Светофил
|
Описание конструкторов процесса сборки светочувствительного робота, работающего на солнечных батареях. |
|
Автономные летательные аппараты на разреженном воздухе (АЛАРВ)
|
Команда, занимавшаяся разработкой этих аппаратов (Autonomous Light Air Vessels (ALAV), основывалась на метафоре новой экологии: создании объектов, которые ведут себя и реагируют особым образом: они являются, с одной стороны, частью сетевой системы, которая концентрируется на автономном и стайном поведениях. У системы есть две составляющих: питание и стадность. |
|
Долгосрочная научно-исследовательская и опытно-конструкторская программа Le CyCab
|
| Две компании - INRIA и INRETS - c 1991 года ведут исследования по созданию этой новейшей интеллектуальной транспортной системы для городов будущего. В исследованиях можно выделить два отдельных направления: создание машин общего пользования и интеллектуального транспорта. |
|
Адаптивный пятипалый захват MRK
|
| Манипулятор MRK разработан на основе информации об адаптивном захвате "Mechanical Arm" доктора Идо. |
 |
Полуавтономные подводные аппараты выполнения заданий (SAUVIM)
|
SAUVIM (Semi-Autonomous Underwater Vehicle for Intervention Missions) предназначен для работы на глубинах до 6000 м. Он оборудован роботизированной рукой, различными встроенными датчиками, батареями, контроллером реального времени VxWorks, несколькими процессорами, а также сложным программным обеспечением. |
 |
Правая рука компании Shadow
|
| Описание роботизированной руки, разработанной компанией Shadow. |
 |
Как я кормлю своих кошек при помощи Линукса
|
Позвольте вашему Linux управлять событиями реального мира с магической помощью недорогого микроконтроллера от компании Parallax, программы, написанной на Python и последовательного порта. |
 |
KiRo – игрок в настольный футбол
|
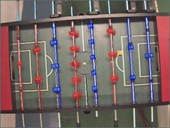
| KiRo – полностью автономный робот – игрок в настольный футбол. Он воспринимает футбольное поле с помощью камеры и, в зависимости от текущей ситуации, решает, какие рычаги использовать. KiRo разработан в институте информатики Фрайбургского университета в рамках исследований, связанных с робототехникой и искусственным интеллектом. |
 |
«Ползучий» робот
|
| Эта многофункциональная автоматизированная «ползучая» система (Multifunction automated crawling system (MACS)) была сконструирована для переноски миниатюрных инструментов, необходимых для выполнения широкого круга исследовательских задач; при этом этот робот прикреплен к тому объекту, который он обследует. |
 |
Перекати-поле: полярный вездеход
|
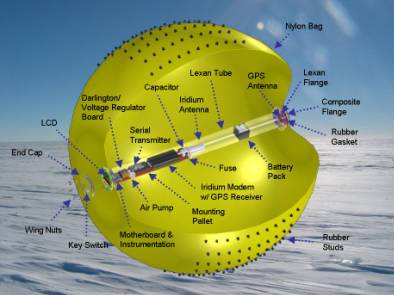
| Вездеход Перекати-поле (Tumbleweed Rover), разрабатываемый в настоящее время в Лаборатории реактивного движения США, - это большой надувной шар, передвигающийся под воздействием ветра, во внутренней части которого находится полезный груз в виде различных инструментов. |
 |
|










