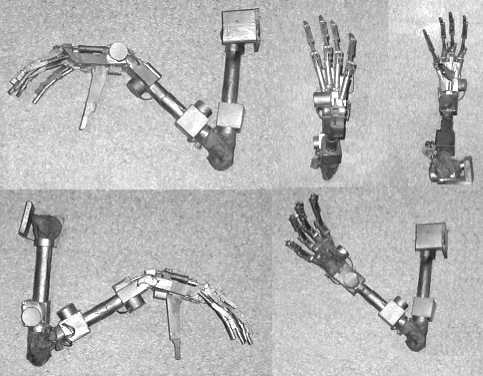
Манипулятор MRK разработан на основе информации об адаптивном захвате "Mechanical Arm" доктора Идо. Основой пяти пальцев MRK послужили усовершенствованные адаптивные пальцы японского проекта. Главной особенностью MRK является привод всех пяти пальцев от одного электродвигателя. При этом каждый палец сохраняет свойство адаптации. Если захват зажимает предмет с рельефной поверхностью, то пальцы адаптируются к изгибам объекта, а давление схвата распределяется равномерно. Недостатком данного манипулятора является многорычажная конструкция пальцев и отсутствие возможности управления каждым пальцем в отдельности. Управление манипулятором дистанционное посредством специального рукава с пультом зажима. Сигналы передаются по радио, либо по кабелю через разъем в корпусе робота.
|
 |