Как работает система?
АЛАРВы включают в себя три летающих объекта (Бубба (Bubba), Флиппер (Flipper) и Хабиб (Habib)), которые существуют в сетевой среде и взаимодействуют с помощью заданных поведений, образующих три сценария: взаимодействие АЛАРВа с человеком, АЛАРВа – с другим АЛАРВом, АЛАРВ, действующий сам по себе.
От проектирования до представления
Команда разработала и интегрировала технологию в объекты манипулирования в воздушной среде. АЛАРВы – это не умозрительные прототипы, которые будут созданы в ближайшем будущем, а скорее, функционирующие объекты. АЛАРВы сконструированы таким образом, чтобы вести себя и реагировать определенным образом: они знают о наличии друг друга, о своем окружении и реагируют на действия людей. Это автономные объекты, действия которых связаны с двумя направлениями: поисками питания и нахождением в стае. Для отчетливого представления и передачи концепта непрогнозируемости среды АЛАРВы используются понятие стадного поведения.
Сценарии
1. ALAVs один | автономный
Роботы автономны в смысле процесса принятия решений, они определяют свою траекторию, контролируя направляющие моторы. Роботы перемещаются в поисках пищи или других членов стаи. Кроме того, они стремятся к общению, поэтому, оставаясь в одиночестве в течение слишком долгого времени, они начинают издавать нервные крики. Это поведение демонстрирует их коллективное сознание.
Точный механизм поиска пищи и людей определяется алгоритмом. Иногда один корабль отбивается от стаи, и если через две минуты АЛАРВ не находит другой корабль, то он начинает издавать шум. Этот звук издается вибратором мобильного телефона, резонирующим с наполненным гелием баллоном.
2. АЛАРВы с другими АЛАРВами | стадность
Когда роботы не ищут питание, они постоянно ищут друг друга, требуя внимания. Когда они сталкиваются друг с другом, то начинают заигрывать друг с другом, выполняя танец распознавания дружественного члена стаи. В ответ должен раздаться специальный звук, выражающий подтверждение дружелюбия.
Находясь в непосредственной близости друг к другу, АЛАРВы распознают это присутствие и начинают стайное поведение. При выполнении этого поведения АЛАРВы (2 или 3) кружатся и переговариваются друг с другом. Поведение остается активным в течение 30 секунд или до тех пор, пока другие роботы не сместятся в сторону. У стайного поведения есть два представления: близких и далеких пространственных отношений, так как АЛАРВ может знать о присутствии других членов стаи, даже если они не находятся в непосредственной близости.
3. АЛАРВы и человек | питание
Чтобы покормить робота, приблизьтесь к нему аккуратно и привлеките его внимание. Они просто не смогут умерить свой аппетит. Держите пищу напротив них, - и они не пропустят ее. Кормление - это и есть способ роботов взаимодействовать с людьми. Вы можете оценить степень голода АЛАРВа по специальному светодиоду. Если он горит голубым светом, то можно приблизиться и покормить робота, если красным – они сыты и не отреагируют на ваше приближение.
Поведение кормления активируется, когда человек, держащий пищу, приближается к АЛАРВу. Вы привлекаете его внимание, когда он прекращает текущее поведение и работу моторов. Робот начнется питаться через 10 секунд, если пища остается поблизости. Для индикации питания служат три синхронизированных ключа: 1. начинает мигать голубой светодиод; 2. загорается лампочка на пище; 3. пища начинает вибрировать (имитация кормления с рук).
Через 10 секунд АЛАРВ насытится, если человек, предлагающий пищу, будет оставаться поблизости. При насыщении загорается красный светодиод, который горит в течение 15 секунд, пока робот переваривает пищу. При завершении цикла снова загорается голубой диод, и вы снова можете кормить робота.
Процесс
Как же удалось спроектировать нечто, функционирующее в неопределенной, быстроменяющейся обстановке с неизвестными результатами? В качестве образца для подражания была взята природа: команда провело тщательное исследование солнечных пятен, и выяснила, как их использовать в качестве центральной станции для разнообразных внешних систем. Затем было проведено исследование проектных решений для испытания возможностей технологии, воплощенной в нашей системе.

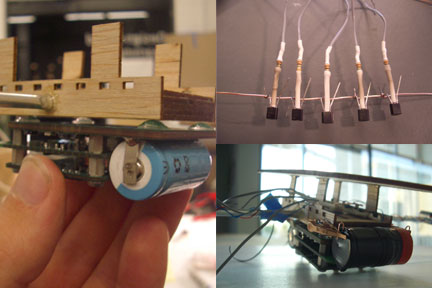
Творческая работа над существующей технологией дистанционно управляемого аэростата в качестве отправной точки.

Первое тестирование плавучести.
Первый полет с солнечным пятном, вспомогательной 3-вольтной литиевой батарейкой, 5 интегральными схемами и моторами. Изначально планировалось использование Н мостовой схемы для управления токов и создание возможности вращения мотора в две стороны. Однако, из-за необходимости эффективного маневрирования (например зависания) команда решила использовать пять независимых моторов, чтобы учесть все направлениях.

Разработка схемы для первого прототипа. Сначала для ограничения протекания электрического тока в базе, команда сначала хотела использовать транзисторы 2n2222 с резисторами 150 Ом, чтобы предотвратить короткие замыкания и выгорания контактов.
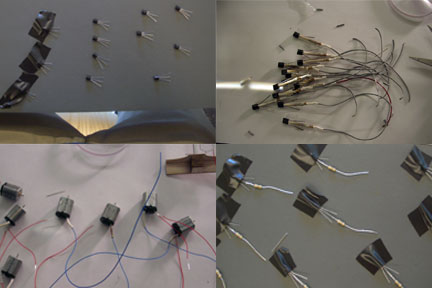
Подбор деталей для последних моделей. Были усовершенствованы конструкция и схемы, чтобы рационализировать вес, энергию и эффективность. Новая схема включала транзисторы 2N7000 и резисторы 1 Ом (что защищало транзисторы от статических электрических разрядов, так как они проводят только очень слабый ток). Так как солнечное пятно генерирует 4,9 В на контактах ввода-вывода, данные транзисторы являются лучим решением для соединения моторов с солнечными пятнами.
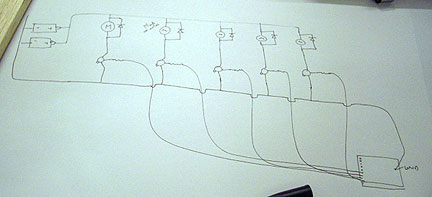
Схематическое изображение моторов.
Использование солнечного пятна в качестве центральной станции для управления внешними компонентами.
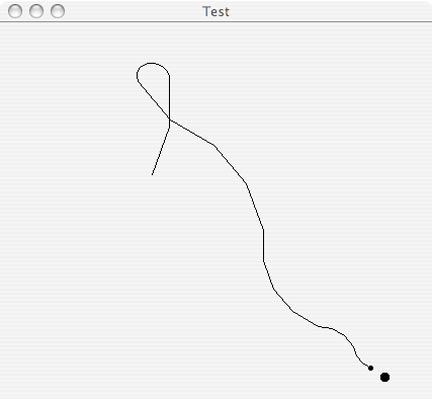
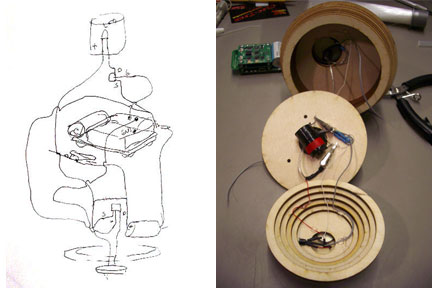
Кроме того, что нужно было создать необходимые схемы, команде также пришлось подумать и о разработке программного обеспечения. Выше показана иллюстрация разработки приложения Java, предназначенное для тестирования навигационных возможностей прототипа (планировалось применение дальней радиосвязи для направления робота в указанное место).
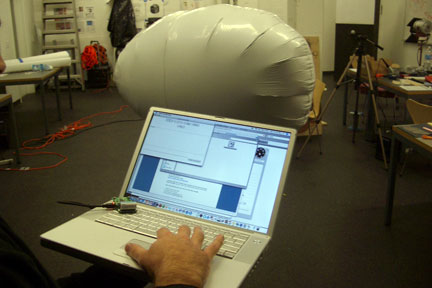
Затем было создано приложение для контроллера аппарата. В качестве платформы для управления бортовыми моторами АЛАРВа использовался ноутбук.

Ноутбук предназначался для записи данных, так чтобы команда могла отладить окончательный навигационный алгоритм. Это был наилучший способ тестирования непрогнозируемости поведения АЛАРВа в реальном мире.
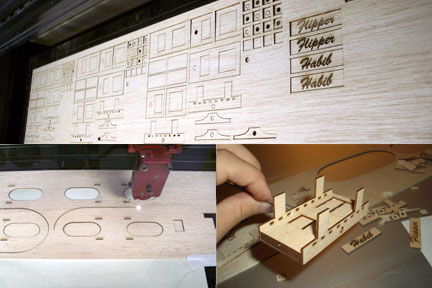
Кроме тестирования программного обеспечения, для большей точности команда лазером вырезала из пробковой древесины корзину, подвешиваемую под баллон, заполненный гелием, для помещения в нее аппаратного обеспечения. Команде пришлось много всего переделывать, когда они осознали, что малейшая неточность в распределении веса может повлечь серьезные последствия для функционирования АЛАРВа.
Сборочная линия.
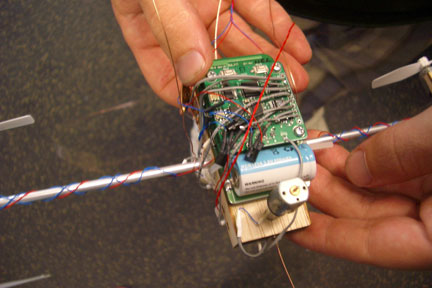
Сборка окончательных моделей.
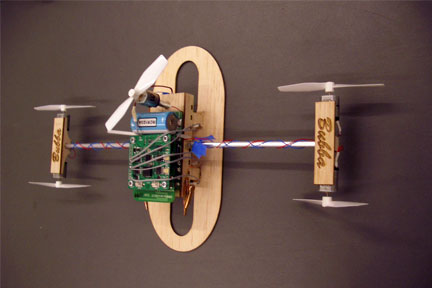
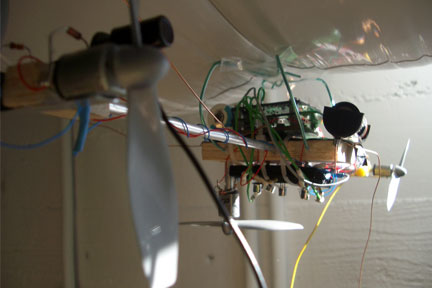
Окончательная модель Буббы.
После того, как модель была завершена, разработчики занялись созданием компонентов, необходимых для завершения работы над сценариями. Сначала была создана пища (на рисунке выше), а затем на баллоне закреплен вибратор мобильного телефона (на рисунке ниже).
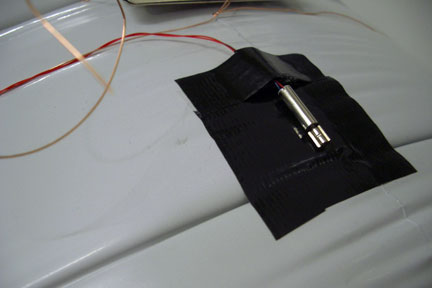
Вибратор быстро резонирует через заполненный гелием баллон и издает звук, напоминающий крики кита.

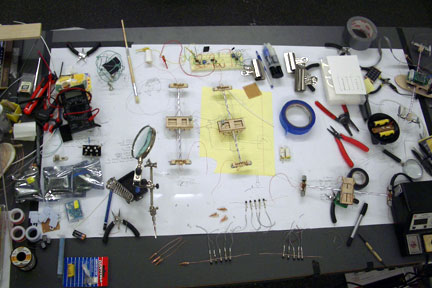
Финальная отладка после интегрирования аппаратного и программного обеспечения для создания завершенной, функционирующей системы.
|











