Робот-чистильщик (Scribbler robot). Статья Дика Свана (Dick Swan)
|
Робот-чистильщик появился в результате усилий трех компаний: Parallax, Inc.; Element Producs, Inc. и Bueno Systems, Inc. Это очень недорогой робот с дифференциальным управлением, идеально подходящий для использования в качестве учебной или базовой модели. У него имеется достаточно сенсоров для реализации основных типов поведения роботов, таких как движение по линии, избегание препятствий, распознавание света. Управление роботом осуществляется процессором Basic Stamp, который может быть перепрограммирован пользователем. В комплект также входит встроенное двухуровневое программное обеспечение, рассчитанное на различных пользователей. С его помощью роботу можно задать специфическое поведение. |
|
Робот-внедорожник
|
| В предлагаемой статье подробно описано создание шасси для робота-внедорожника на примере автономного робота "Journey Robot (jBot)" . Шасси этой модели обладает следующими характеристиками: шесть колес; дифференциальный привод на все три оси; у каждого колеса независимая подвеска и система устойчивости. По этой ссылке Вы можете найти различные материалы относительно jBot, в том числе видео jBot в действии. |
|
Ветолет LM-1
|
| Это не робот, но будущие роботов. Этот минивертолёт весит всего 15г и может подниматься на несколько мм. Моя собственная модель (на этом сайте я - Lexa) |
|
WorkPartner
|
| WorkPartner - это мобильный сервисный робот с интерактивным управлением, который предназначен для выполнения повседневной работы на улице. |
|
Робот Вася
|
| "Робот Вася" был сделан для первой российской Олимпиады роботов по эскизам Павла Рябинкова. |
 |
Как сделать дешёвый роботизированный микровертолёт
|
| Эта статья - описание того, как самому собрать дистанционно управляемый вертолет весом всего 300 грамм. |
 |
Робот INSPECTOR SR - 12. Фотографии в действии
|
Передвижной интервенционно-инспекционный робот INSPECTOR SR - 12
Габаритный чертеж |
 |
Передвижной интервенционно-инспекционный робот INSPECTOR SR - 12
|
| Четверть века опыта ПИАП (PIAP) в области построения промышленных роботов, управления, электроприводов, сенсорики и телесистем, а также многолетнее научное сотрудничество с зарубежными партнерами в этой области сделало возможным разработку передвижного робота для интервенционно-инспекционных целей. Работы над проектом были частично финансированы Комитетом Научных Исследований как целенаправленный проект. Полицейские специалисты - пиротехники высказывали своё мнение о применении проекта на всех этапах его создания. В свою очередь робот прошел многонедельные тесты в трех полицейских частях. Таким образом, была придана конечная форма серийно производимой конструкции под этим названием. |
 |
Колесный мобильный робот для жилых и производственных помещений
|
| Основное назначение этого колесного мобильного робота - доставка средств контроля в исследуемую зону (помещение) |
 |
Приключения робота Билла и Рона
|
Перевод статьи Билла Бойерса и Рона Бранденбурга о созданном ими роботе, опубликованной на сайте Dallas Personal Robotics Group. |
 |
Роботопия: поможем миру стать безопаснее для технократов
|
Перевод статьи Дениса Дрэхейма о созданных им роботах, опубликованной на сайте Dallas Personal Robotics Group. |
 |
Крутой гонщик (low rider): мой первый робот, следующий по указанному пути
|
Перевод статьи Джона Вэдли (John Wadley), описывающей созданного им робота и опубликованной на сайте Dallas Personal Robotics Group. |
 |
Робот-футболист, который управляется системой Linux в реальном времени
|
В этой статье, написанной аспирантом исследовательского института роботостроения Шанхайского Университета ДжиаоТонг (ШДжТУ, Shanghai JiaoTong University, SJTU) Хуангом Йи (Huang Yi), описывается робот под управлением RTLinux, принявший участие в последнем робо-турнире под номером 5. |
 |
МОБИЛЬНЫЙ РОБОТ SR04.
|
Статья является переводом описания робота, опубликованном на сайте www.dprg.org. Автор проекта - Дэвид Андерсон (David Anderson). |
 |
Автоматизированный дирижабль (Аэробот)
|
| Аэробот является автономным управляемым летательным аппаратом, весящим меньше воздуха, который в качестве основного подъемного средства использует баллон, наполненный гелием. |
 |
Робот, подающий теннисные мячи, – Mark II (The Electronic Ballboy Mark II)
|
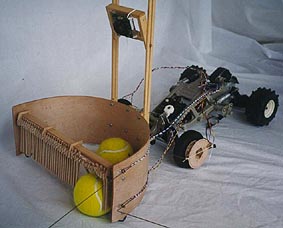
| Автор проекта – Рохан Харрисон (Rohan Harrison)
В рамках этого проекта по созданию робота, подающего теннисные мячи, были проведены исследования во многих сферах робототехники, в том числе проектирование и реализация управляющих систем, датчиков и алгоритмов. |
 |
Просто вертолет
|
| Простой в изготовлении вертолет,способный подниматься на высоту от 2 до 10см (зависит от балансировки - вертолет летит вбок). |
 |
Роботы-бульдозеры
|
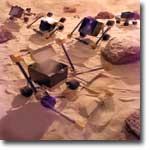
| Крошечные роботы-бульдозеры, разработанные Лабораторией реактивного движения NASA, вероятно, в недалеком будущем будут вскапывать и «упаковывать» почву на Марсе. Созданная модель заменит и бульдозеры, и самосвалы. |
 |
nBot Balancing Robot
|
| Знаменитый двухколесный балансирующий робот Дэвида Андерсена был признан лучшим роботом недели в рейтинге NASA в мае 2003 года. |
|
Паробот (Steambot)
|
В этой небольшой статье конструктор-робототехник И Вей (I Wei) описывает, как он собрал робота, работающего на паровом двигателе. На его интернет-сайте вы можете увидеть фотографии множества других роботов, движение которых осуществляется за счет пара. |
|
|











