Основные возможности
- возможность одновременного управления всеми степенями свободы робота с помощью джойстика и клавиатуры
- предохранение манипулятора от самоповреждения
- сохранение постоянной ориентации плеч манипулятора
- оснащение робота четырьмя цветными видеокамерами, одна из которых имеет поле обзора 360°
- широкий ассортимент дополнительного оснащения робота, приспособленный для индивидуальных потребностей клиента
- визуализация конфигурации плеч робота на мониторах поста оператора
- графическое изображение положения препятствий вокруг робота
- дополнительная передняя гусеница, позволяющая плавное преодоление препятствий и неровностей территории, например, лестницы
Применения
Инспектор СР - 12 (Inspector SR -12) может заменить человека там, где его жизнь или здоровье находятся под угрозой.
Типичные применения - это:
- разрядка и удаление зарядов взрывчатых веществ
- инспекция территорий, зараженных химическими веществами, или находящихся под угрозой заражения
- заправка горючим опасных веществ в цистерны
- работа в условиях сильной задымленности во время тушения пожаров
- горноспасательная служба, например, инспекция коридоров, находящихся под угрозой обвала
- самостоятельное патрулирование назначенных территорий
Конкретное применение он может найти в следующих службах:
- Полиции - отделениям превенций и антитеррористическим группам
- Армии - инженерно-саперным, химическим и пиротехническим службам
- Отделениям химической спасательной службы
- Пожарной охране
- Станции горноспасательной службы
- Пограничной охране
- Отделениям гражданской обороны
- Службам охраны объектов
 Общее описание Общее описание
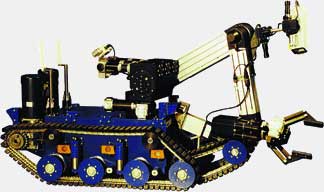
Робот состоит из гусеничной передвижной платформы, закрепленного на ней манипулятора с захватом, а также поста оператора. Робот может быть управляем дистанционно оператором (телеуправляемый) с применением радиосвязи или кабельной связи, или также может выполнять запрограммированные ранее задачи. Расстояние, на какое возможна радиосвязь, зависит от вида и количества препятствий, находящихся между роботом и постом оператора.
Робот приводится в движение двумя двигателями постоянного тока, питаемыми от аккумуляторов, находящихся внутри передвижной платформы или с помощью кабеля от сети 220 В. Аккумуляторным питанием оснащен также пост оператора и независимо от него пульт управления. Во время наружного питания (с помощью кабеля) аккумуляторы автоматически подпитываются.
Гусеничная передвижная платформа
 Передвижная платформа оснащена гусеничным приводом с переменной геометрической структурой, благодаря чему является возможным преодоление неровностей территории, а также крутых подъемов. Две передние гусеницы имеют возможность изменения угла наклона на ±30 градусов, что обеспечивает стабильность робота при преодолении высоких препятствий, а также лестниц. Передвижная платформа имеет эластическую подвеску, которая подгоняет форму гусеницы к почве и обеспечивает равномерное распределение нагрузок. Передвижная платформа оснащена гусеничным приводом с переменной геометрической структурой, благодаря чему является возможным преодоление неровностей территории, а также крутых подъемов. Две передние гусеницы имеют возможность изменения угла наклона на ±30 градусов, что обеспечивает стабильность робота при преодолении высоких препятствий, а также лестниц. Передвижная платформа имеет эластическую подвеску, которая подгоняет форму гусеницы к почве и обеспечивает равномерное распределение нагрузок.
Все системы робота управляются бортовым компьютером, находящимся внутри передвижной платформы, объединенный в одно целое с подсистемами: датчиков, управления и изображения. В отделении передвижной платформы помещены два гелиевых аккумулятора, питающих робот. Состояние зарядки аккумуляторов показывается на мониторе пульта управления оператора, а также на переносном пульте управления. Радиосвязь происходит двумя независимыми каналами: изображения и управления. Когда связь между роботом и постом оператора будет прервана, робот автоматически останавливается. Защита радиосвязи от постороннего доступа или перехватки управления робота осуществляется с помощью оборудования и программ (кодирование данных).
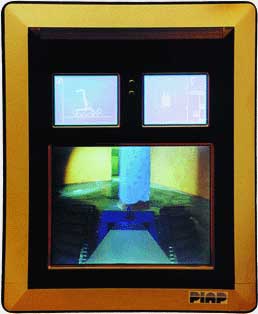 На очередном мониторе поста оператора показывается графическое изображение наклона передних гусениц, а также визуализация конфигурации манипулятора на основании сигналов от соответствующих датчиков. На очередном мониторе поста оператора показывается графическое изображение наклона передних гусениц, а также визуализация конфигурации манипулятора на основании сигналов от соответствующих датчиков.
Для увеличения безопасности управления роботом применено два предела скорости гусениц: от 0 до максимальной скорости (порядок работы, применяемый во время проезда на место действия), а также от 0 до запрограммированной скорости, например, до 20% максимальной скорости (порядок работы, применяемый во время выполнения оперативных действий, когда требуется большая точность движений).
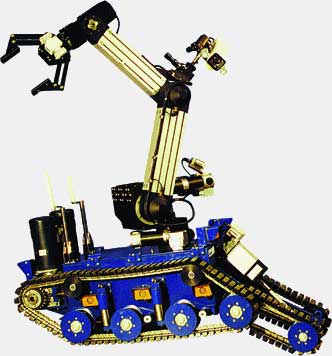
Манипулятор и захват
Манипулятор с 5 степенями свободы, оснащен захватом, закреплен в передней части передвижной платформы.
Манипулятор состоит из вращающейся колонки, а также их двух плеч (нижнего и верхнего) и из независимой оси запястья, оснащенной универсальным механическим гнездом.
На оси запястья находится универсальный механический интерфейс, служащий для быстрой и легкой замены элементов оснащения, таких как: дальнейшие степени свободы (например, независимая шестая ось, выдвижное плечо, захват), дополнительное оснащение (дрель, X-Ray, датчики) и воооружение (ружьё, пиротехнический выбрасыватель). Механизм захвата приводится в движение двумя двигателями постоянного тока. Механическая структура захвата делает возможным осуществление бесконечного вращения лап вокруг оси, а также параллельное движение хватательных наконечников.
 Система приведения в движение манипулятора защищена предохранительными муфтами, которые минимизируют последствие отдачи во время выстрела из пушки или ружья, а также уменьшают последствия взрыва заряда, помещенного в захвате или вблизи него. Кинематическая структура манипулятора обеспечивает постоянную пространственную ориентацию объекта, помещенного в захвате, независимо от движения остальных плеч манипулятора. Система приведения в движение манипулятора защищена предохранительными муфтами, которые минимизируют последствие отдачи во время выстрела из пушки или ружья, а также уменьшают последствия взрыва заряда, помещенного в захвате или вблизи него. Кинематическая структура манипулятора обеспечивает постоянную пространственную ориентацию объекта, помещенного в захвате, независимо от движения остальных плеч манипулятора.
Из-за сложной кинематической структуры манипулятора, а также для облегчения оператору телеоперации, на экране монитора показывается графическая интерпретация актуальной конфигурации плеч манипулятора. В роботе установлены автономные функции, которые противодействуют самоуничтожению элементов манипулятора в результате неправильного управления, выполненного оператором. Сила зажима лап захвата показывается графически на пульте оператора.
Пост оператора
 Пост оператора состоит из: Пост оператора состоит из:
- основного компьютера,
- телевизионного монитора ЛЦД (LCD) 15" для демонстрирования изображения из камер, (возможность работы в широком диапазоне температур),
- двух вспомогательных мониторов ЛЦД (LCD) для графической интерпретации данных, получаемых от (ранее описанных) датчиков,
- переносного пульта управления.
Для транспортных целей может временно подпитываться.
Переносной пульт управления исполняет функцию интерфейса между оператором и передвижным роботом. Он разделен на следующие секции:
- джойстик (с переключателем быстро/медленно, для управления скоростью передвижной платформы),
- секция управления манипулятором: ( по три переключателя для каждой степени свободы манипулятора: два - для управления направлением движения с постоянной скоростью движения, один - для включения поста с помощью джойстика),
- джойстик для управления манипулятором с переключателем выбора камер,
- управления вооружением (четыре переключателя для четырех независимых видов оружия или оснащения, защищены дополнительным переключателем, а также зажиганием ),
- 8 функциональных переключателей, конфигурируемых с помощью программ.
 Переносной пульт может быть полностью отделен от поста оператора. Переносной пульт может быть полностью отделен от поста оператора.
Видеокамеры
Робот может быть оснащен четырьмя цветными камерами, объединенными в одно целое в корпусах с двойными галогенными рефлекторами, что делает возможным работу при недостаточном освещении или в полной темноте. 
• Две камеры подвижные: одна помещена спереди передвижной платформы на сервомоторе, регулирующем угол наклона движущейся передней гусеницы. Благодаря этому поле зрения изменяется вместе с поднятием или опусканием передней гусеницы. Вторая направлена назад, помещена на вращающейся основе манипулятора. Поле зрения оператора изменяется вместе с вращением основы манипулятора.
• Манипуляционная камера помещена на захвате. Угол зрения камер 90°
• Основная камера помещена на верхнем плече манипулятора. Она установлена на вращающейся головке, позволяющей вращение камеры в горизонтальной и вертикальной плоскостях. Камера оснащена объективом с переменным фокусом с возможностью автоматического регулирования диафрагмы, а также с возможностью ручного, дистанционного регулирования резкости и фокуса
Техническое описание
Основная версия
Мобильная база
|
Размеры (со сложенным плечом) |
1710/670/1140 мм
(длина/ширина/высота) |
|
Полная масса |
550 кг |
|
Максимальная скорость робота |
~1 км/ч |
|
Максимальное время работы с батареей |
2 - 8 часов |
|
Пределы наклона передних гусениц |
± 30° |
|
Допустимый фронтальный наклон (способность преодолевания лестницы) |
35° |
|
Допустимый боковой наклон |
22° |
|
Дистанционное управление |
pадио-кабель |
|
Радиопередача (управление) |
цифровая |
|
Предохранение передачи (управления) |
FHSS и кодирование |
|
Радиопередача (изображение) |
аналоговая |
|
Максимальная дальность радиопередачи |
80 - 1000 м |
|
Кабель (управление, изображение, зарядка аккумуляторов) |
с наматывающим устройством и направляющая кабеля прикреплённая на роботе |
|
Масса кабеля |
0,18 кг/м |
|
Стойкость кабеля на растягивание |
200 КГ |
Стандартное оснащение мобильной базы
- главная коробка с электрическими системами и аккумуляторами,
- главные гусеницы на эластической подвеске,
- наклонные передние гусеницы,
- главные двигатели привода гусениц с перегрузочными сцеплениями,
- коробка на дополнительное оснащение, набор ключей, 4 резиновые накладки на гусеницы, 2 галогенные лампочки для осветителей камер, предохранители.
Манипулятор с захватом
|
Число степеней свободы: |
5 + сжатие хватательных наконечников захвата |
|
Оборот основания манипулятора |
± 200° |
|
Оборот захвата |
± 90° |
|
Оборот хватательных наконечников |
без ограничений |
|
Ширина разжатия хватательных наконечников |
320 мм |
|
Максимальная грузоподъёмностъ |
на сложенных плечах: 60 кг
на вытянутых плечах: 30 кг |
Стандартное оснащение манипулятора
- перегрузочные сцепления в главных степенях свободы,
- датчики крайних положений плеч манипулятора,
- сохранение постоянной ориентации в пространстве отдельных частей манипулятора во время движения остальных,
- на верхнем плече гнездо для зарядки и управления дополнительного оснащения, а также оружия,
Видеокамеры робота
- ведущая передняя, цветная, широкоугольная
- ведущая задняя, цветная, широкоугольная
- захвата, цветная, широкоугольная
Все камеры с собственными галогенными осветителями (2 x 20 В).
Операторский пост
|
Размеры постa во время работы
после сложения |
236/67/80 см
159/67/60 см |
|
Масса операторского постa (с пультом) |
107 кг |
|
Изображение из камер робота |
дисплей 15" LCD (цветной) |
|
Время работы постa от батареи |
4 ч (операторский пост с пультом) + 3 ч (пульт управления) = 7 ч |
|
Управление всеми функциями робота |
Отключаемый пульт управления с двумя джойстиками, кнопками управления, указателями LED и системой связи с роботом по радио и кабеля |
|
Масса переносного пульта управления вместе со стеллажом и подтяжками |
9,5 кг |
Дополнительное оснащение
|
Вариант |
Описание |
|
1 |
Дополнительные два дисплеи LCD на операторском посту для графической интерпретации данных с датчиков робота |
|
2 |
Звуковой сигнал аварийных ситуаций на пульте управления |
|
3 |
Датчики положения манипулятора (необходимо выкупить позиции 1 и 2) |
|
4 |
Программа для автоматического складывания манипулятора до транспортной позиции (необходимо выкупить позиции 1, 2, 3) |
|
5 |
Стационарный стеллаж главной камеры, закреплённый на горном плече манипулятора |
|
6 |
Подвижной стеллаж главной камеры, закреплённый на горном плече манипулятора, с возможностью дистанционного управления изменением положения камеры (вверх-вниз, вправо-влево) |
|
7 |
Главная камера, цветная; дистанционная регулировка приближения (zoom 168x) и резкости, галогенные осветители 2x20В (необходимо выкупить вариант 5 или 6) |
|
8 |
Датчик силы сжатия захвата |
|
9 |
Круговой микрофон на роботе |
|
10 |
Два дополнительные гнезда (передняя и задняя часть мобильной базы) для зарядки и управления дополнительным оснащением, а также для оружия |
|
11 |
Подсветка клавиатуры пульта управления |
|
12 |
Кабелеоснащение для записывания хода действий (изображение и звук) на наружном видеорегистраторе (цена без регистратора) |
|
13 |
Записывание хода действий (изображение и звук) на видеорегистраторе (в цене видео плэйep [videowalkman]) |
|
14 |
Приспособление операторского поста и пульта для работы с дополнительными камерами (для четырёх камер), расставленных роботом либо оператором на месте действий |
|
15 |
Автономная камера: камера, радиопередатчик, аккумуляторное питание, стеллаж (необходимо выкупить позицию 14) *) |
|
16 |
Ручка и кабелеоснащения для рентгеновского устройства Golden Inspector XR-200 для просвечивания подозрительных зарядов. |
|
17 |
Крепление/компенсатор с лазерным прицелом для деструкторов WP 20 i WP 26 B, с возможностью дистанционного детонирования с пульта |
|
18 |
Крепление/компенсатор с лазерным прицелом для самозарядного гладкоствольного ружья калибр 12 Benelli модель M1 SUPER 90 (с возможностью дистанционного детонирования с пульта) с обеспечением самозаряда оружия. |
|
19 |
Набор сменных хватательных наконечников захвата: - удлинённые в сравнении со стандартными, - выгнутые под углом 90o |
|
20 |
Устройство для выбивания автомобильных стёкол |
|
21 |
Набор запасных аккумуляторов для робота |
|
22 |
Набор запасных аккумуляторов для операторского поста |
|
23 |
Устройство для зарядки двух запасных аккумуляторов робота или операторского поста |
|
24 |
Набор запасных аккумуляторов пульта |
|
25 |
Устройство для буксира автомобилей |
|
26 |
Крепление и кабелеоснащение для рентгеновского устройства каждого типа *) |
|
27 |
Крепление/компенсатор с лазерным прицелом для деструкторов каждого типа, с возможностью дистанционного детонирования с пульта *) |
|
28 |
Крепление/компенсатор с лазерным прицелом для самозарядного ружья различных типов (с возможностью дистанционного детонирования с пульта) с обеспечением самозарядки оружия |

*) Необходима поставка технической документации устройства: размеры, масса, тип, характеристика боеприпасов и тд. Необходимы будут также консультации между специалистами клиента и PIAP.
Габаритный чертеж и фотографии работы в реальной обстановке можно посмотреть ЗДЕСЬ>>>
|
 |










