Робот оборудован двумя цветными камерами в качестве системы зрения и лазерным дальномером для определения местоположения вратаря. Связь между членами команды из ШДжТУ осуществляется с помощью беспроводного LAN-соединения. Робот управляется встроенной операционной системой Red Hat Linux, которая улучшена надстройкой RTLinuxPro, работающей в режиме реального времени.
Введение Матч и конференция всемирного футбольного турнира роботов (Robocup) – это серия конкурсов и выступлений, способствующих интеграции систем искусственного интеллекта (ИИ) и исследований в области роботостроения. Футбольный матч между роботами – это хороший испытательный полигон, позволяющий проверить функционирование ИИ, конструкцию и систему управления робота, системы обработки изображений, а также системы обработки противоречивых данных. Команда "JiaoLong" из ШДжТУ успешно участвовала во многих робо-турнирах. В частности, она выступала на China Retail Conference (CRC) в Шанхае, Китай, 2002; RoboCup в Падуе (Padua), Италия, 2003; CRC в Бейджинге (BeiJin), Китай, 2003, RoboCup в Лиссабоне (Lisbon), Португалия, 2004; и на CRC в Гуаньчжоу (GuangZhou), Китай, 2004. Наши роботы Наши роботы сделаны в Исследовательском институте по робототехнике ШДжТУ в рамках проекта по созданию недорогих автономных роботов для в группах, работающих в реальном времени и предназначенных работать в изменяющихся и неопределенных условиях. Можно создать такую команду роботов, рассматривая каждого робота, как автономную физическую единицу, способную разумно действовать в изменяющейся окружающей обстановке. Робот должен обладать такими свойствами, как достаточная мощность, как механическая, так и вычислительная, и точность действий. Физически робот состоит из ходовой части, датчиков, системы обмена данными и управляющей системы. Роботы первого поколения Ниже на рисунке 1 показаны роботы-футболисты первого поколения, созданные в ШДжТУ в 2002 году. 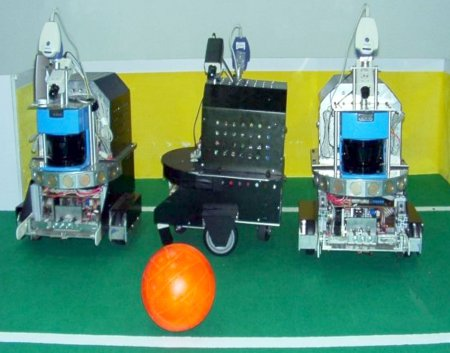
Рисунок 1: Роботы-футболисты (ШДжТУ) первого поколения, до 2002.
Роботы второго поколения На рисунках 2-6 показано второе поколение роботов, разработанное в 2003 году. 
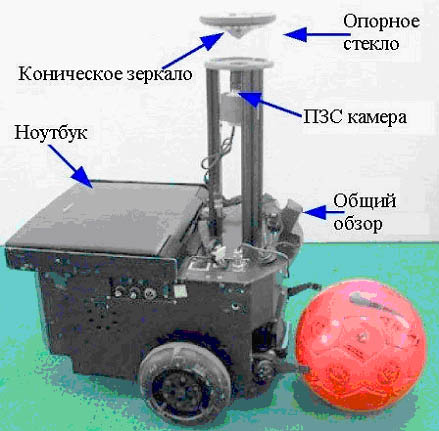


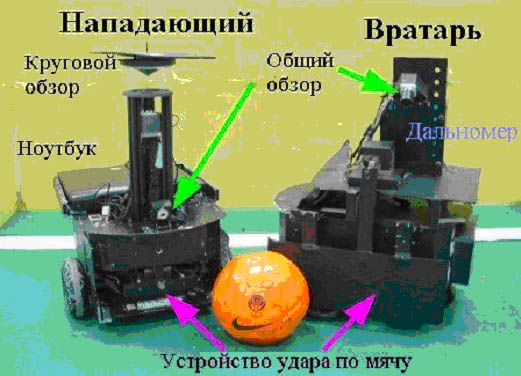
Рисунки 2-6: Роботы-футболисты команды из ШДжТУ, после 2002 г.
Роботы третьего поколения На рисунках 7 и 8 (ниже) показаны роботы-футболисты третьего поколения, которых мы разработали в последние месяцы. 

Рисунки 7 и 8: Текущая модель роботов-футболистов команды из ШДжТУ.
Ходовая часть роботов. В основе каждого робота – модель автомобиля размером 20 x 20 x 31,5 дюймов (50 x 50 x 80 см), весом 44 фунта (20 кг), с дифференциальным управлением и питанием от источника постоянного тока. Робот может по команде двигаться вперед, или назад, а также поворачивать налево и направо. Для игры в футбол мы разработали устройства для удержания мяча и удара по нему. Системы датчиков Робот использует 2 цветные видеокамеры для получения изображения. Первая, с интерфейсом USB, используется, чтобы видеть близкорасположенный мяч. Вторая, с интерфейсом IEEE-1394, позволяет роботу видеть ворота и мяч далеко от себя. Две камеры используются для увеличения обзора робота, одной камеры недостаточно. Обе камеры закреплены на роботе и отличают мяч от ворот по цвету. Кроме того, у робота есть лазерный дальномер для обнаружения вратаря и два датчика положения, определяющих расположение робота на основе имеющихся у него данных. Система связи Для связи наших роботов используется устройство беспроводной локальной сети, при этом каждый робот оборудован картой беспроводной связи для передачи данных со скоростью 1,1 Мб/с и выступает как узел локальной сети. Система управления Система управления состоит из двух компьютера (верхнего и нижнего). Верхний – это ноутбук с процессором Пентиум 4 2,4 ГГц, 256 Мб оперативной памяти и жестким диском IBM емкостью 30 Гб. С нижним компьютером он связан через последовательный порт, скорость передачи данных 19,2 Кб/с, а с лазерным дальномером связь осуществляется через интерфейс IEEE-1394. Верхний компьютер, под управлением RT-Linux, используется для сбора данных датчиков в реальном времени и для связи, также в реальном времени. Нижний компьютер используется для управления движением. 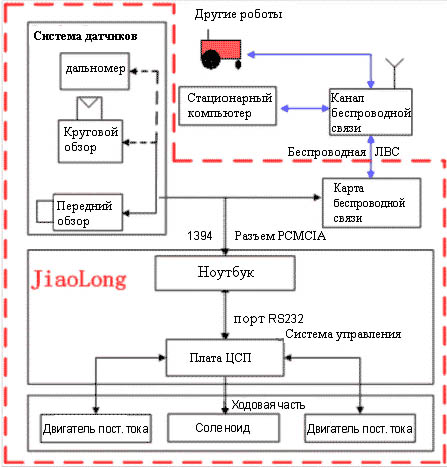
Рисунок 9: Архитектура аппаратных средств.
Организация системы программного обеспечения Операционная система робота - Red Hat 9.0 совместно с RTLinuxPro 2.1 (версия ядра: 2.4.25-rtl). На рисунке 10 приведена архитектура системы программного обеспечения. Мы используем распределенную архитектуру на основе приоритетов. Управляющий модуль робота работает в ядре RTLinux, а 4 потока работают в ядре Linux. Эти 4 потока работают независимо и составляют распределенную архитектуру. Мы используем rt-fifo (дисциплина очереди - первым пришел – первым обслужен, работающая в реальном времени) для связи ядер Linux и RTLinux. 
Рисунок 10: Архитектура системы программного обеспечения.
Каждый поток обладает своим приоритетом, определяющим его доступ к системным ресурсам. Наивысшим приоритетом обладает основной модуль управления роботом, ниже идут потоки управления восприятием с видеокамер (потоки 1 и 2). Еще более низкий приоритет у лазерного дальномера, а самый низкий – у системы одометрии. Если происходит ошибка в одном из датчиков, робот продолжает работать. Задачи потоков 1 и 2 – управление камерами для получения картинок и обработки текущего изображения. Поток 3 обрабатывает данные с лазерного дальномера, а поток 4 – с одометра. Потом вся информация собирается вместе и передается основному управляющему модулю робота по системе rt-fifo. Основной управляющий роботом модуль также имеет 4 потока. Поток восприятия обрабатывает данные, полученные с нижнего компьютера и других потоков с датчиков. Поток, отвечающий за взаимодействие с внешней средой, строит ее модель на основании имеющихся данных с использованием методологии «классной доски». Поток взаимодействия позволяет членам команды обмениваться информацией с использованием компоненты RTLinux LNet. Поток решения управляет всей системой на основании анализа всей информации в целом.
Информация об авторе – Хуанг Йи (Huang Yi) – аспирант исследовательского института по робототехнике Шанхайского Университета ДжиаоТонг (Shanghai JiaoTong University's SJTU).
|











