Введение
Робот может передвигаться только на ногах, только на колесах, или одновременно
используя и колеса, и ноги.
Пассивное зрение, дополненное датчиками нескольких типов.
Ориентирование полностью автоматическое и основано на построении карты в
исходно неизвестном окружении.
Робот обучается выполнению квалифицированной работы во время интенсивного
общения с оператором.
Гибридная система передвижения позволяет роботу быстро передвигаться и
преодолевать препятствия.
Манипуляторы в виде человеческих рук способны выполнять задачи подобно
человеку, в случае необходимости пользуясь инструментами.
|
2 части корпуса, соединенные подвижным суставом
4 ноги с электроприводом на колесах
-ДxШxВ 1,4x1,2x(0,5-1,2)м
Степени свободы:
- Платформа 4x3
+4 колеса
+сустав корпуса
- Манипулятор
+2 руки x 5
+2 в самом манипуляторе
Гибридная система питания
Двигатель внутреннего сгорания
- Макс. мощность при работе в непрерывном режиме 1 кВт.
- Продолжительность работы 30 мин при максимальной мощности
- Бак емкостью 0,3 литра
- С баком 2 литра - 3 часа работы
4 батареи
- свинцовые батареи 18 А-часов
|
Максимальный клиренс 0,7m
Максимальная скорость на колесах 7 км/час.
Вес с манипулятором - около 230
кг.
1 Персональный компьютер
5 микроконтроллеров
Шина CAN
Датчики:
- 13 потенциометров
- 8 датчиков давления
- датчики наклона
- гироскоп с 3-мя углами ориентации
- датчики ускорения
- 4 ультразвуковых сенсора
- лазерный дальномер
- камера
- дальномеры
|
|
|
|
Техническое описание
Механика
Одинаковые части робота идентичны друг другу: одинаковые колеса, ноги,
одинаковая конструкция "мускулов" и моторов для них. Нажмите на ссылку,
чтобы посмотреть конструкцию линейных приводов (pdf).
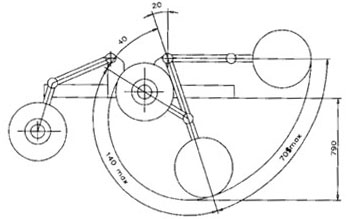
Чертеж с габаритными размерами
платформы
Последовательные этапы разработки
конструкции робота.
Рабочая часть

Рабочая часть крепится на несущей платформе двумя суставами, которые
позволяют ей двигаться по горизонтали и вертикали. С установленными
манипуляторами WorkPartner перестает быть похожим на
человека, и его стоит называть не гуманоидом, а скорее, центавроидом.
С помощью двух рук-манипуляторов робот должен уметь обращаться с предметами, длина
которых больше, чем длина руки робота – это умение необходимо для выполнения многих
задач. Двумя руками робот может поднимать предметы весом до 10 килограммов и
размером до 1 метра.
Движение манипуляторов и платформы управляется одной системой управления
движением.
Электроника и компьютеры.
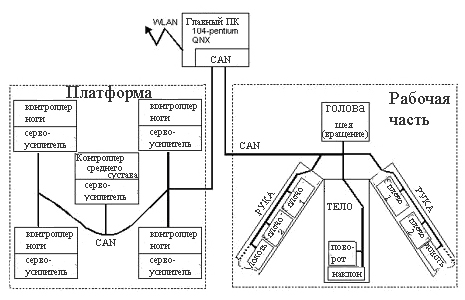
Каждая нога робота управляется своим контроллером (обозначен контроллер ноги),
каждый из которых основан на микроконтроллере Siemens
167 и PHYTEC 167-mini-MODULE. Такой же контроллер управляет и центральным
суставом. Для других узлов требуются большие вычислительные мощности, например,
для управления передвижением робота, расчета пользовательского интерфейса, или
системы ориентирования робота, и эти вычисления проводятся на плате PC-104.
Также можно подключить дополнительные вычислительные мощности с помощью
беспроводной локальной сети (WLAN). Основной компьютер робота - это 586 на
плате PC-104, работающий под управлением операционной системы QNX. В
электронную часть робота также входят серво контроллеры для приведения в
действие моторов и специально разработанные платы усиления для датчиков
давления во всех суставах ног.
Рабочая часть робота также соединена с шиной CAN.
Основным отличием является подсоединение каждого сустава и контроллера мотора к
этой шине. Контроллер мотора состоит из модуля CAN и цифрового сигнального
процессора. Он позволяет считывать и управлять положением, скоростью и
прилагаемым усилием. Отдельно управляется только поворот головы в двух
направлениях.
Все оборудование модульное и легко в эксплуатации и поддержке. Платы управления
ногами робота и средним суставом одинаковы, также используются одни и те же
платы микроконтроллеров и сервоусилителей. В случае
поломки автоматическую систему можно отключить и воспользоваться внешним ручным
пультом управления.
Архитектура программного обеспечения
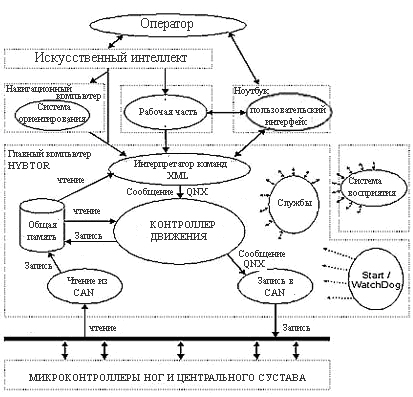
Разработка и планирование программного обеспечения ведется с помощью UML, а
программный код пишется с использованием методов объектно-ориентированного
программирования. Структура управляющего программного обеспечения представлена
на рисунке. Оно состоит из нескольких иерархических уровней, которые взаимодействуют
между собой посредством специального командного языка WorkPartner,
который создается на основе XML.
Оператор управляет уровнем "искусственного интеллекта", который затем
передает команды нижележащим уровням. Задачи на выполнение работы передаются
манипулятору, а если нужно переместиться в другое место, то системе
ориентирования. Платформа Hybtor служит для передачи
на верхний иерархический уровень. Службы системы восприятия доступны всей
системе. Кроме того, параллельно с системой ИИ может использоваться обычный
пользовательский интерфейс.
Архитектура программного обеспечения платформы робота.
Все программы платформы
Hybtor разделены
на несколько параллельных процессов. Служба
Start/
Watchdog запускает все
остальные процессы в установленном порядке. После этого она остается активной и
наблюдает за их состоянием. Служба распознавания команд выполняет функцию
посредника между платформой и верхним иерархическим узлом. Служба
"Контроллер движения" занимается всеми расчетами, касающимися
планирования движения платформы. "Память совместного доступа"
содержит все данные, полученные от сенсоров ног и центрального сустава.
"Чтение из CAN" получает сообщения из шины CAN и записывает их в
память общего доступа. "Передача в CAN" посылает управляющие команды
контроллерам ног и среднего сустава.
Архитектура управления
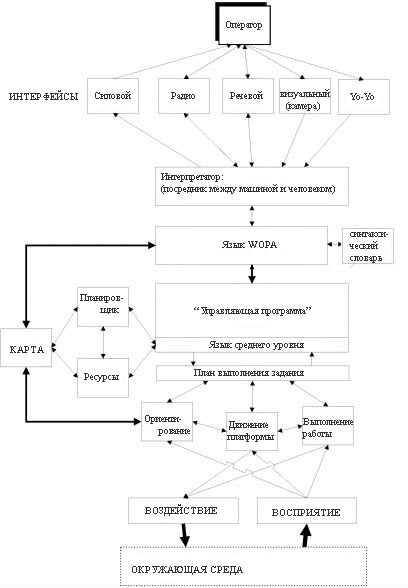
Пользователь формулирует задачи на языке высокого уровня (на схеме
"язык WoPa"). В синтаксис языка входят
команды и объекты текущего окружения, в которое входят окружающее пространство,
отдельные объекты и их возможные свойства. Под объектами понимаются либо
реальные физические предметы, либо неизвестные предметы в указанном месте.
Окружение робот запоминает в виде базы данных объектов, в которую входит
двумерная карта и координаты расположения объектов. Объекты представлены в виде
прямоугольников соответствующего размера с именем-указателем и списком содержания.
Управляющая программа интерпретирует команды пользователя и планирует порядок
действий для решения поставленной задачи. Она создает последовательность команд
на языке среднего уровня для управления различными подсистемами робота. Язык
среднего уровня состоит из набора команд для определенного режима управления.
Например, таким образом можно собрать данные с датчиков во время их работы.
Другой набор команд заставит робота выполнять достаточно сложные задачи,
используя одновременно и двигательную, и рабочую части, в том числе
манипуляторы.













