Форма определяется содержанием (ФОС) – это технология быстрой разработки приложений, при которой элементы конструкции одновременно формируются и устанавливаются на место. Как видно на рисунке, основной цикл ФОС состоит в поочередном наслоении и формировании (в изображенном примере это механическая обработка) слоев рабочего материала и расходной подложки.
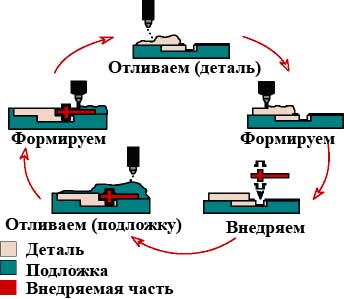
Поочередная отливка, формирование и удаление материала обладает тремя ключевыми достоинствами:
- Послойное формирование частей дает инженеру/конструктору полный доступ ко всей внутренней структуре любого механизма.
- Благодаря этому имеется возможность устанавливать приводы, датчики и другие предварительно сделанные детали внутри самой конструкции.
- Возможность замены наслаиваемого материала позволяет управлять механическими свойствами отдельных частей механизма.
В результате получаются механизмы практически произвольной формы, со встроенными приводами, датчиками, с заранее заданной изменяющейся жесткостью, благодаря чему они становятся более надежными и простыми в управлении.
Далее описывается, как по этой технологии сделаны ноги робота-таракана. Про эволюцию этого робота и его конструкцию можно узнать в следующей части статьи.
Технология производства гибких ног с двумя суставами по технологии ФОС |
 |
0. Устройство ног. |
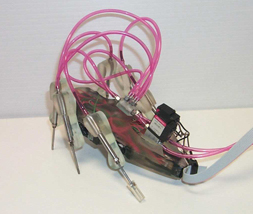
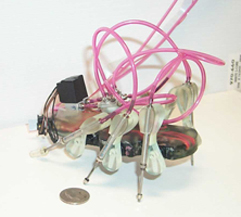
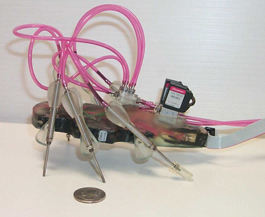
Готовая нога  |
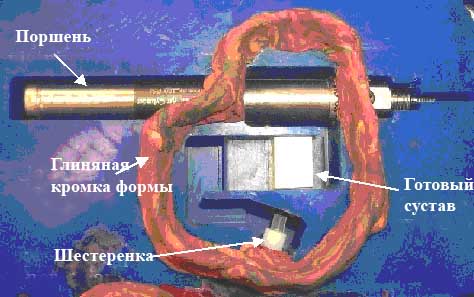
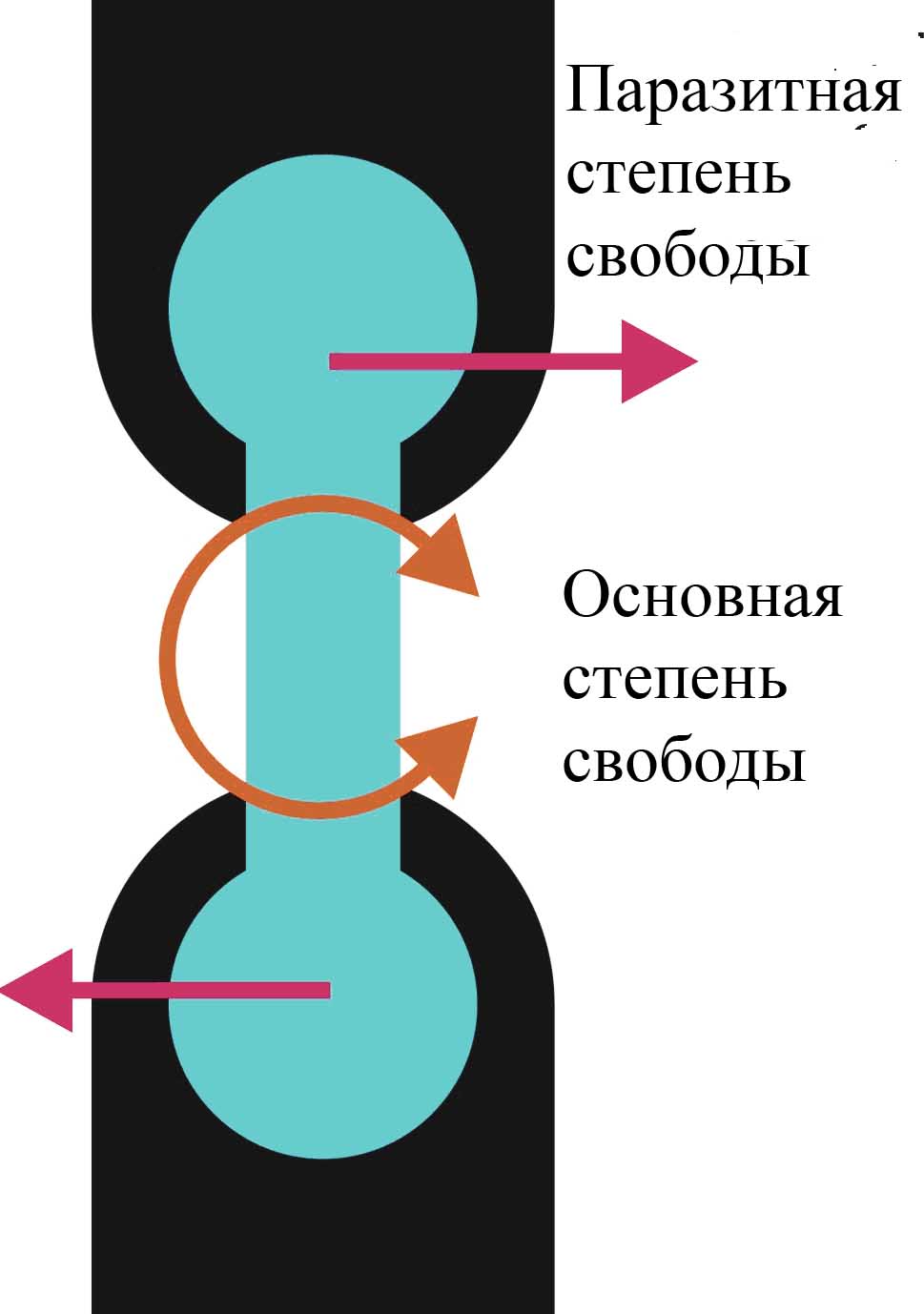
Эти конечности разработаны для шестиногого робота, который должен походить на живого таракана, как с виду, так и по динамике движения. Для совмещения гибкости суставов с жесткостью опоры в ноге сочетаются два типа уретана: новейший полимерный, жесткий 70DC и более податливый 90A. Две основные степени свободы ноги показаны на рисунке. Однако при такой конструкции появляется дополнительный изгиб вокруг оси, параллельной направлению смещения ноги.
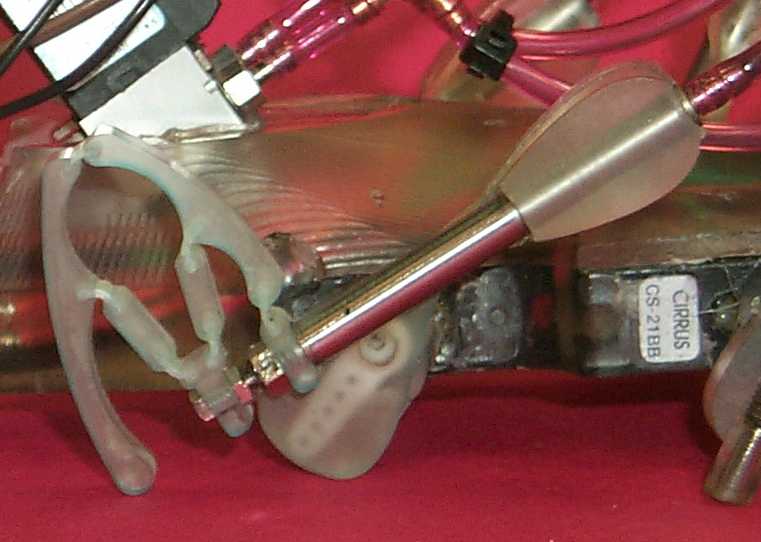
Нога состоит из скрепленных вместе поршня Airpel E9, заранее сделанного гибкого сустава и внутренней шестеренки-переходника для сервомотора Hi-Tech 500BB. Еще один подвижный сустав формировался во время процесса создания ноги. Для того, чтобы сделать внутреннюю шестеренку-переходник, во время ФОС-процесса, когда нога отливалась, в материал сначала частично внедрялась, а потом убиралась шестеренка мотора. Для создания ноги потребовались две заливки обоих типов уретана и 7 отдельных ЧПУ разрезов (разрезы, выполняемые фрезерным станком с числовым программным управлением). |
I. Формирование подвижного сустава
|
Примерный вид сустава  |
Предварительные опыты с уретаном 90A показали, что он слишком мягкий, чтобы его можно было обрабатывать обычными методами. Его можно зажать со всех сторон более жестким пластиком, или воском, и обрабатывать только верхнюю поверхность. Во время этой операции поверхность получается с большим числом неровностей, которые, однако, не играют большой роли, если изгиб не влияет на эту поверхность.
Например, данный сустав состоит из кремового уретана 90A, окруженного прозрачным 70DC. В настоящем случае деформации на левой и правой поверхности сустава максимальны, и их надо отливать. Обрабатывать можно только верхнюю поверхность. |
Ограничение на механическую обработку, неизменяемое направление формирования (оно определяется шаблоном и конструкцией фрезерного станка с ЧПУ) означают, что поверхности сустава, деформация которых максимальна, перпендикулярны направлению формирования. Однако, именно эти поверхности обрабатываются во время ФОС процесса.
Чтобы избежать этого, но все-таки сделать сустав гибким, он был изготовлен отдельно и, во время отливки ноги был помещен в жидкий уретан 70DC. Данный конкретный сустав состоит как из гибкого 90A, так и поддерживающего 70DC. При попытке сделать сустав только из мягкого уретана, но при кристаллизации уретана связь получается более прочной, если внедрен более жесткий материал (70DC), а застывает более мягкий (90A), или такой же (тоже 70DC).
Здесь можно узнать о некоторых тонкостях заливки уретана во время процесса ФОС. В этой презентации можно получить дополнительную информацию.
| Заранее изготовленные суставы  |
II. Подготовка элементов для внедрения |
Шестеренка  |
Перед внедрением деталей в уретан необходимо все тщательно подготовить: зачистить поверхность поршня для более прочной связи, нанести ленту на отливаемые поверхности и установить шестеренку мотора.
Шестеренка Hi-Tech 500BB со вспомогательными элементами (воск и винт) показана на рисунке. На нее подавался положительный относительно заливаемого уретана потенциал. После окончательного формирования ноги шестеренка из нее вытаскивалась. |
III. Делаем форму для отливки и размещаем внедряемые детали
|

Форма для отливки
Форма и разрезы детали были разработаны в Solidworks и экспортированы в Unigraphics для управления фрезой. Фрезерный станок, на котором был создан этот сустав, – HAAS, с возможностью трехмерного числового программного управления. Механическая обработка поверхностей нужна для юстировки и размещения внедряемых элементов. |
Внедряемые детали
 |
IV. Первая заливка 70DC
После размещения всех внутренних деталей форма была залита уретаном 70DC. Уретана было взято чуть больше, чем нужно, чтобы можно было снять верхнюю поверхность и, тем самым, удалить большинство пузырьков, возможный мусор и другие неоднородности из будущей детали.
 
Заливка уретана 70DC
V. Формирование второго сустава |
 Заливка 90A Заливка 90A
|
Еще один сустав был сделан прямо во время ФОС-процесса формирования ноги. Часть застывшего уретана 70DC была вырезана фрезой, а образовавшаяся полость была залита уретаном 90A, также немного избыточно. |
VI. Окончательное формирование и извлечение |
 Готовая нога Готовая нога
|
Для окончательного завершения ноги потребовалось еще две операции с фрезой. Во время первой уретану была придана окончательная форма, а во время второй нога была вырезана по контуру. Таким образом, ногу можно было извлечь из восковой формы. 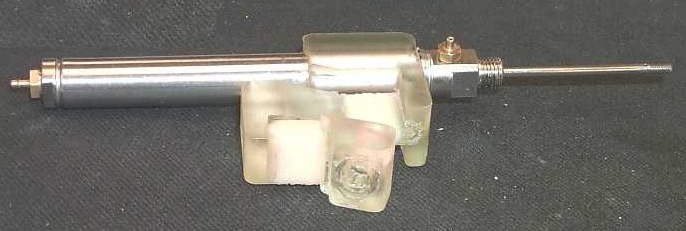
|
VII. Заметки
- Во время застывания уретана 70DC образуется гораздо больше пузырьков, чем при использовании уретана 90A (или любого другого, более жесткого полимера). Существует мнение, что 70DC активнее реагирует с водяным паром воздуха, во время этой реакции образуются различные газы, в частности монооксид углерода.
- Лента закрывает застывший уретан 90А от взаимодействия с жидким 70DC во время последующих заливок. Ее легко убрать из уретана после того, как вся деталь извлечена из восковой формы.
- Гибкий сустав внедряется достаточно прочно и органично, однако при описанном методе часть пузырьков оказывается на его нижней поверхности, и их убрать уже невозможно, они остаются в детали
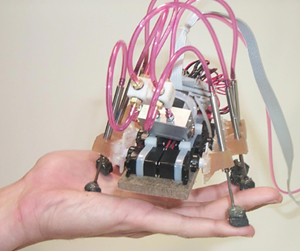
Shape Deposition Manufacturing
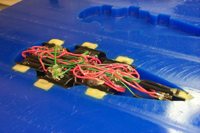
Спрол 1.0
Регулируемая шестиногая платформа
(объясняем "на пальцах" основные преимущества ФОС)
Джордж Чэм (Jorge Cham) и Син Бэйли (Sean Bailey), 7/14/99
 
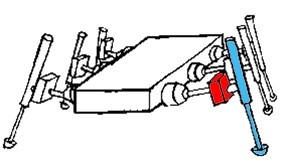
Цель: Спрол, модель 1.0 – это регулируемая платформа на шести ногах, у каждой из которых задействовано 2 степени свободы. Целью работы является экспериментальная проверка идей схем передвижения, конструкции ног и их расположения. Также мы хотим продемонстрировать преимущества технологии ФОС.
Время создания: ~ 2 недели.
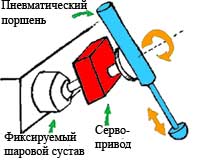
Принципиальная схема: у каждой ноги есть два сустава: призматический (управляется пневматическим поршнем) и вращающийся (управляется сервомотором с дистанционным управлением). К платформе ноги прикрепляются шаровидными суставами, их можно зафиксировать и, тем самым, установить определенную ориентацию ноги относительно платформы. Два небольших пневматических клапана-тройника регулируют давление с обеих сторон поршня в каждой ноге. В этой модели ни положение ног, ни касание ими пола не измеряется.
Предварительные эксперименты: проще всего привести робота в движение, если попеременно переключать давление между тройками ног (одна тройка: две ноги с одной стороны робота и одна с другой). Если робот опирается только на одну тройку ног, то его положение в общем случае неустойчивое. Сервоприводы, управляющие ориентацией ног, ТОЛЬКО поддерживают ноги в одном направлении. Однако благодаря запрограммированной в микроконтроллере податливости этих приводов, они работают как пассивные скручивающие пружины с фиксированной точкой крепления. Таким образом, движением робота можно управлять всего лишь с помощью двух степеней свободы (по одной на каждую тройку ног), так работают и некоторые игрушки. Такое движение больше похоже на спотыкания, или на череду начинающихся падений с восстановлением равновесия, чем на статически-стабильную ходьбу, или чисто динамический бег. Как видно на видео (ниже), характер "спотыканий" и скорость движения зависят от величины угла между ногой и платформой.
Видео-ролики: Видеоролики записаны в формате Quicktime, который можно скачать здесь.
Выводы: Двигается робот не особо впечатляюще, но возможности открываются большие. Во-первых, мы задействовали не все степени свободы. Во-вторых, продемонстрированная псевдо-динамическая спотыкающаяся походка гораздо интереснее, чем статические шаги. Можно заменить сервопривод обычной скручивающейся пружиной и движение будет похожим – упругость играет очень важную роль в движении. Интересно, что робот спотыкается, если ноги расположены примерно так же, как у таракана (передние наклонены вперед, а задние и средние назад)
Такое спотыкание можно объяснить следующим образом:
Робот поднимает одну тройку ног и остается на другой тройке, нагрузка на которую возрастает. Отклонение сервоприводов увеличивается из-за их податливости (реализовано с помощью пропорционального управляющего цикла). Таким образом, платформа наклоняется и немного сдвигается вперед.
В этот момент опускается другая тройка ног. Так как робот сдвинулся вперед, она опускается немного впереди своего предыдущего положения. К тому же, когда ноги касаются пола, они толкают его, одновременно сдвигая вперед и выпрямляя. После этого тройки ног меняются ролями, и цикл повторяется.
Sprawl 1.0
Миниспрол. Версии 0.1 и 0.2
Миниатюрный шестиногий бегун, созданный по технологии ФОС.
Джордж Чэм 10/12/99
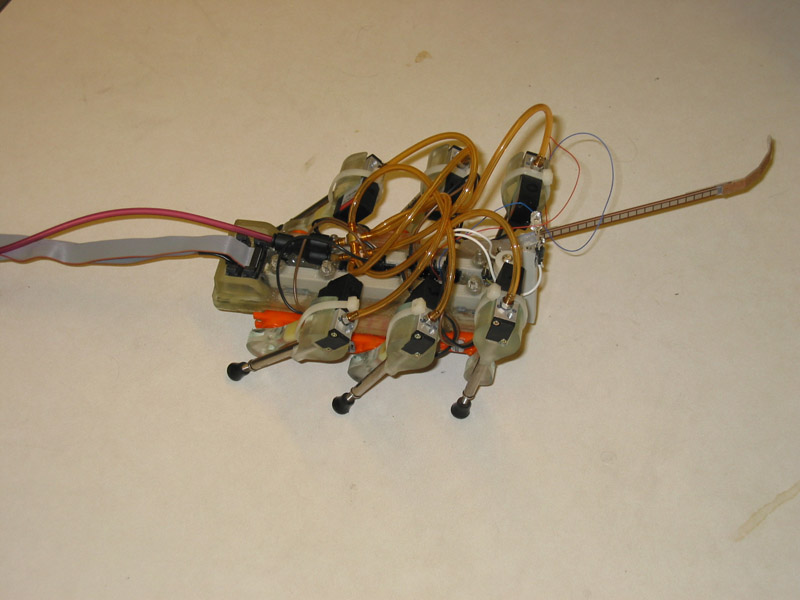
Цель: Миниспрол, модели 0.1 и 0.2 – это робот на шести ногах, у каждой из которых задействовано 2 степени свободы. Как и Спрол 1.0, эта модель предназначена для исследования движения, конструкции ног, их расположения и определения областей применения ФОС. Эта версия меньше предшественника и нам было интересно, насколько можно уменьшить размер робота и к чему это приведет.
Время создания: ~ 2 дня. При создании робота используются те же электрическая схема и программный код, что и для Спрол 1.0.
Принципиальная схема: У каждой ноги опять две степени свободы: призматический сустав (управляется поршнем) и вращающийся сустав (управляется сервомотором с дистанционным управлением). В отличие от Спрол 1.0, у каждого поршня есть возвращающая пружина, и для их контролирования достаточно клапанов-двойников. Каждый клапан управляет давлением под тремя поршнями тройки опорных ног одновременно. Ноги заканчиваются небольшими мягкими опорами.
В модели 0.1 поршни были жестко связаны с сервоприводами, а в модели 0.2 это соединение эластичное. Оно выполнено в виде наклоненного блока из упругого полимера с низкой жесткостью при вращении, средней при изгибе и с большим сопротивлением при сжатии.

Управление: как и в модели Спрол 1.0, движение почти автоматическое. Сервоприводы (задающие углы наклона ног) по команде устанавливаются в определенное положение. Поршни в каждой опорной тройке ног управляются одновременно. Тройки ног включаются и выключаются попеременно с определенным коэффициентом заполнения (если он равен 55-ти процентам, то это означает, что 10% времени рабочего цикла обе тройки работают одновременно). Благодаря такому включению/выключению ног и упругости бедренных сервосуставов, робот начинает двигаться.
Предварительные испытания: во время испытаний модели 0.1 (жесткое закрепление бедренных суставов) оказалось, что платформа начинает сильно подпрыгивать или маршировать на месте. Таким образом, при данной конфигурации приводов упругость бедренных суставов просто необходима для движения робота.
Вторая модель робота (Миниспрол-0.2) начинает двигаться, если ноги направлены так, как показано на рисунке выше. Движение робота гораздо более динамично, чем у Спрол 1.0. Как видно на видео, робот бежит: после фазы с опорой на одну из троек ног, следует небольшой промежуток времени, когда робот находится в воздухе.
Видео: Видеоролики записаны в формате Quicktime, который можно скачать здесь. Чтобы повысить скорость воспроизведения, рекомендуется скачать версию с меньшим разрешением.
В видеороликах ниже давление в поршнях было 100 фунтов на кв.дюйм (70 кПа.), коэффициент заполнения рабочего цикла 35%, его длительность 300 мс.
| Разрешение, размер | Описание |
|---|
640х480, 11,3 Мб.
160x120, 2,5 Мб. |
Вид сбоку. |
640х480, 15,3 Мб.
160x120, 3,1 Мб. |
Вид спереди. |
640х480, 4,2 Мб.
160x120, 1 Мб. |
Вид сверху. |
640х480, 12 Мб.
160x120, 2,5 Мб. |
Изгиб ног. |
Заключения:
- Двигается этот робот почти так же, как и модель монопода, на которую обычно ссылаются в литературе по этой тематике.
- Как хорошо видно во втором видеоролике, робот сильно качается из стороны в сторону из-за внутренних сил во время фазы движения, когда ноги опираются в землю.
- Скорость движения робота примерно 1 длина_тела за секунду.
- Хотя на видео роликах этого не показано, робот может поворачивать с радиусом поворота 1-2 длины тела, если наклонить пару ног со стреловидной симметрией: для поворота влево переднюю ногу нужно подвинуть немного назад, а переднюю правую ногу вперед.
- Упругое, демпфированное (нет колебаний) закрепление бедра и ступни необходимо для динамического движения.
Выводы: Это предварительные результаты, их еще нужно оценить численно более внимательно, но они представляют большой интерес.
MiniSprawl
Спролита
Еще один шестиногий бегун, созданный по технологии ФОС.
Син Бэйли (Sean Bailey) и Джонатан Кларк (Jonathan Clark) 01/25/2000
Цель: Спролита – это робот, созданный на основе технологии ФОС. Как и у предшественников, Спрол 1.0 и Миниспрол, у нее есть шесть ног с двумя задействованными степенями свободы. Цель ее создания – продолжение исследований по способам передвижения, конструкции ног, их расположению и создание упругой системы передвижения на ногах с использованием технологии ФОС. Размер Спролиты примерно такой же, как и Миниспрола, вес немного больше (270 г вместо 250-ти грамм), бедренные суставы измененной жесткости с одной (основной) степенью свободы.
Время разработки, создания и подготовки к запуску: ~ 2 недели. Электрическая схема и программный код совпадают с использованными в Спрол 1.0.
Принципиальная схема: Как и у предшественников, у каждой ноги опять по две степени свободы: призматический сустав (управляется поршнем), вращающийся сустав (управляется сервомотором с дистанционным управлением) и пассивный упругий бедренный сустав (испытательные образцы ФОС – первый слой ног). Этот новый сустав упруго скручивается, но очень жесткий при попытке его изгиба, или сжатия. Как и в Миниспролах, но в отличие от Спрол 1.0, каждый поршень возвращается пружиной, и для его управления нужен клапан-двойник. Каждый клапан управляет поршнями одной тройки ног одновременно. В этой версии вместо опор-ступней робота используются просто кусочки нейлоновой трубки.
Управление: Как и предшественники, Спрол 1.0 и Миниспрол, этот робот двигается почти автоматически. Сервоприводы (задающие углы наклона ног) по команде устанавливаются в определенное положение. Поршни в каждой опорной тройке ног управляются одновременно. Тройки ног включаются и выключаются попеременно с определенным коэффициентом заполнения (если он равен 55-ти процентам, то это означает, что 10% времени рабочего цикла обе тройки работают одновременно). Благодаря такому включению и выключению ног и упругости бедренных сервосуставов робот двигается.
Предварительные испытания: Как показали испытания, Спролита не только двигается быстрее, чем Миниспрол, но и не отрывается от земли: совсем как настоящий таракан, движение которого мы и пытались воспроизвести.
Видео: Видеоролики записаны в формате Quicktime, который можно скачать здесь. Чтобы повысить скорость воспроизведения, рекомендуется воспользоваться версию с меньшим разрешением.
В видео-роликах ниже давление в поршнях было 100 фунтов на кв.дюйм (70 кПа.), коэффициент заполнения рабочего цикла 35%, его длительность: 300 мс.
ФОС: коренное отличие этого робота от Миниспролов (кроме небольшого изменения сустава бедра) – это технология производства, ФОС. Все тело робота монолитно: сервопривод и соединительные провода внедрены внутрь пластикового тела. Что еще более удивительно, ноги тоже монолитны сервомоторы, упругое бедро и поршни находятся внутри одного элемента.
ФОС-процесс производства тела.


ФОС-процесс производства ног робота.



Sprawlita
Спролус
Спрол, поколение 4 (Спролита усовершенствованная).
Мотохаид Хатанака (Motohide Hatanaka) 02/26/2001
Цель: Спролус – это модификация шестинога Спролита, ход задних ног которого увеличен за счет специального узла, сделанного по технологии ФОС. Необходимость такого усовершенствования обсуждалась в нашей статье ISER 2000, в которой отмечено, что во время движения небольшую часть времени задние ноги исчерпывают запас хода и просто волочатся по земле. Если увеличить ход задних ног, то, как нам кажется, движение робота будет:
- больше напоминать бег, который описывается динамической моделью на основе перевернутой пружины/маятника,
- избавлено от проскальзывания задних ног,
- более быстрым.
Принципиальная схема: Узел усовершенствования крепится к задним ногам Спролиты и предназначен для пропорционального увеличения хода от 20 до 32 миллиметров (сначала ход цилиндров ограничивается с 20 до 16 миллиметров, потом удваивается узлом до 32 миллиметров). Как и ноги Спролиты, этот узел создается по технологии ФОС. Мы попробовали несколько вариантов конструкции и материала этого узла. Наилучшие характеристики и долговечность оказались у узла из ребер из жесткого полиуретана, соединенных суставами из мягкого полиуретана, усиленного волокном. Подробности конструкции этого узла обсуждаются в следующей части.
Узел усовершенствования ног
Узел усовершенствования ног на основе технологии ФОС для увеличения хода задних ног шестинога Спролита.
Мотохаид Хатанака 02/26/01
Конструкция и эволюция узла
Узел предназначен для увеличения скорости и хода задних ног шестинога Спролус. Этот узел представляет собой рычаг, сделанный по технологии ФОС из шести ребер, и позволяет увеличить ход ног в два раза.
1-я версия – это прототип узла из пластиковых ребер, подшипников и стальных зажимов для проверки кинематических характеристик узла.
2-я версия состояла из жестких полиуретановых ребер и соединений из жесткого полиуретана. Эти подвижные соединения были достаточно толстыми, чтобы выдержать нагрузки. К сожалению, они оказались слишком неэластичными и ограничивали скорость движения робота.
На основе данных испытаний второй версии, мы испробовали несколько прототипов соединений, усиленных разными материалами: начиная с хлопка, заканчивая синтетикой и стекловолокном. Наилучшие результаты, с точки зрения свободы движения, прочности и долговечности были достигнуты в комбинации мягкого уретана и ткани из смеси хлопка и полиэстера.
3-я версия состояла из жестких полиуретановых ребер с соединениями из мягкого полиуретана, усиленного стекловолокном. Усиление стекловолокном позволяет сделать достаточно прочные и гибкие соединения толщиной 0,8 мм. Также эти суставы достаточно короткие и изгиба вокруг нежелательных осей не происходит.
Результаты и возможные улучшения:
3-я версия оказалась самой успешной, но следует исправить следующие недостатки:
- В одном из образцов сбой произошел из-за того, что усиливающее стекловолокно отделилось от мягкого полиуретана. Этого можно избежать, если распушить концы волокон для лучшей связи с полиуретановой основой.
- В гибких соединениях кроме основного изгиба, для которого они и предназначены, задействованы нежелательные степени свободы: они гнутся куда не надо (смотри диаграмму ниже). Для уменьшения этого эффекта можно еще сильнее уменьшить их длину.
Результаты Сейчас проверяется, достигнуты ли поставленные задачи. Предварительные результаты показали, что ноги задние ноги больше не проскальзывают, но для увеличения скорости и улучшения динамических характеристик нужно изменить и схему средних и передних пар ног робота. Введенные узлы также увеличивают изгибы ног в нежелательных направлениях и уменьшают силу приводов задних ног при заданном диаметре их поршня. В результате робот двигается в основном за счет передних и средних пар ног. Чтобы уменьшить такой эффект, нужно ослабить эти пары ног.
Текущая работа и планы на будущее (по состоянию дел на 26 февраля, 2001)
Сейчас мы планируем увеличить диаметр используемых пневматических цилиндров, или перейти к приводам из двух пневмоцилиндров на каждую ногу. Для этих цилиндров потребуется больше воздуха и, значит, более мощный насос. Также мы хотим усилить задние ноги и одновременно ослабить передние и средние пары ног.
Sprawlex
Спрольчики
Небольшое семейство искусственных тараканчиков
Особенности конструкции
Спрольчик #01
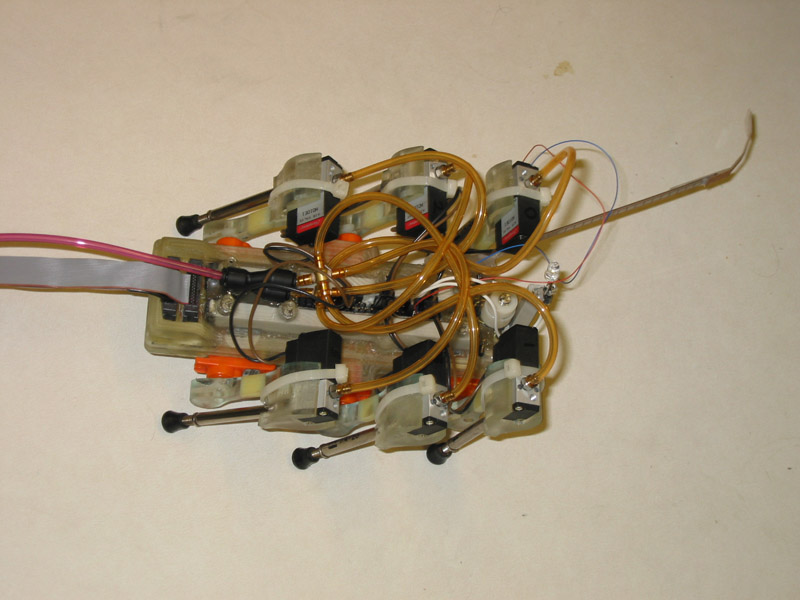
Особенность первого Спрольчика – модульные ноги с изменяющейся жесткостью. Также на нем установлен компас, который, к сожалению, из-за магнитных полей в лаборатории не работал, два светочувствительных датчика и крепежи светодиодов для видеообработки.
  
Спрольчик #02
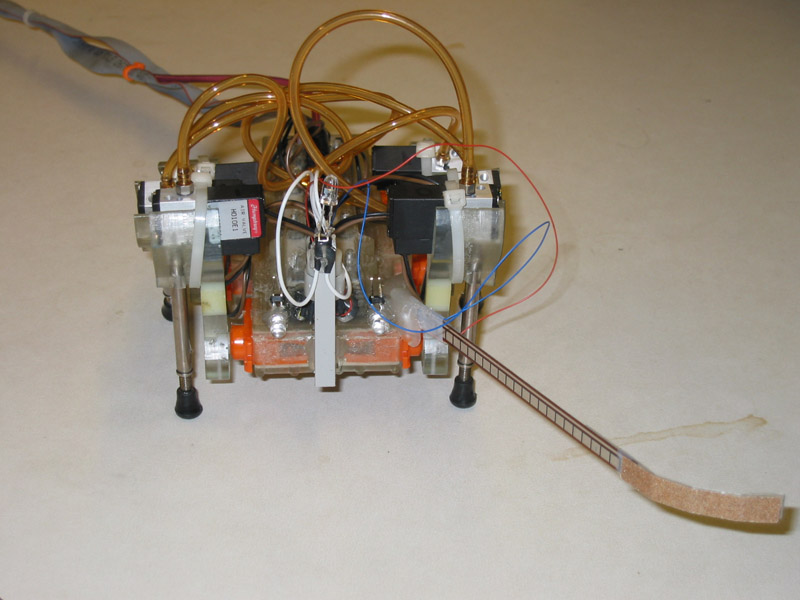
На втором Спрольчике также установлен аналоговый компас, два светочувствительных датчика и крепежи для светодиодов. Кроме этих сенсоров он оборудован антенным датчиком давления длиной с туловище робота для движения вдоль стены (как усы у настоящих тараканов).
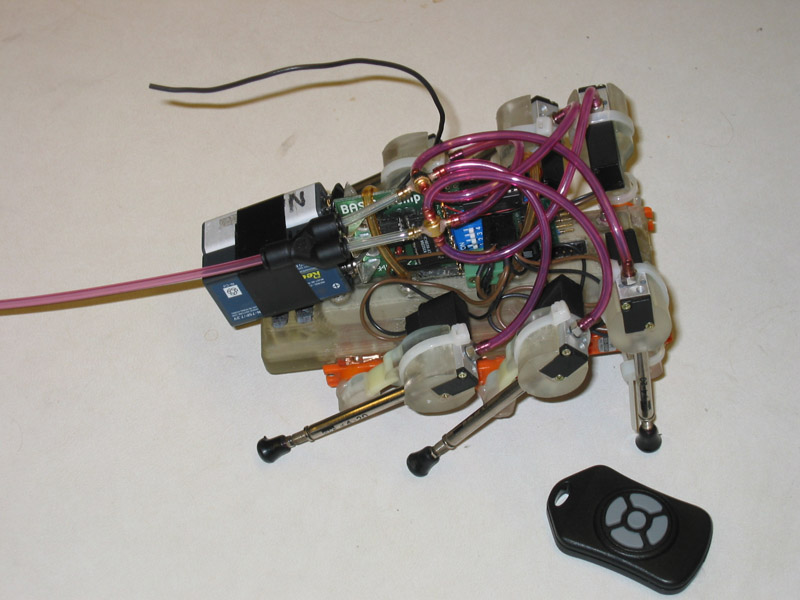
Спрольчик #04 – Транс-Спрол
Конструкция упругих ног четвертого Спрольчика была смоделирована в ADAMS специально для робота с увеличенным весом. На эту модель поставили BASIC Stamp контроллер, радиопередатчик и батареи питания, чтобы сделать робот практически автономным. Ему нужен только шланг подачи сжатого воздуха для работы. Управляется робот передатчиком, смонтированном в брелке для ключей.
Особенности конструкции
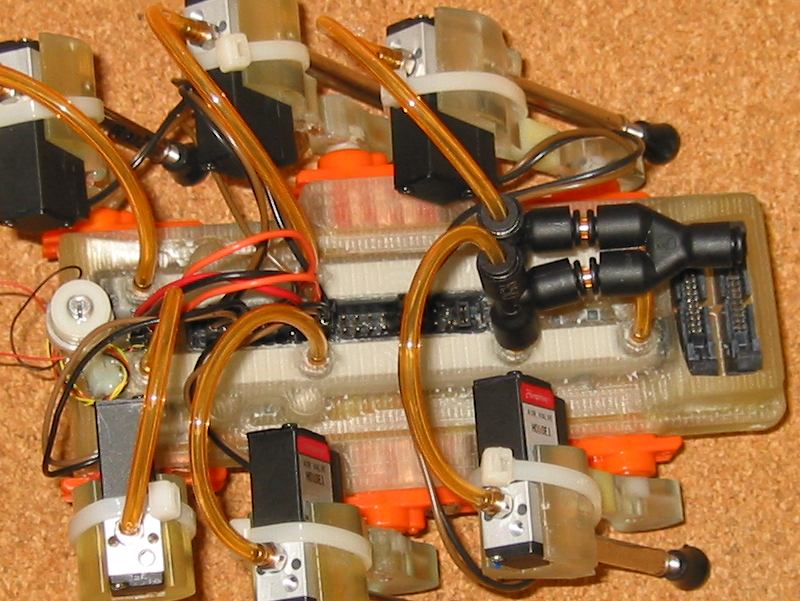
| Для увеличения производительности и управляемости опорно-двигательной системы робота, один клапан управляет одним поршнем одной ноги, а не трех сразу. |
 |
| Для подачи нужного количества воздуха, на теле робота установлено два воздушных резервуара, по одному на каждую половину туловища. |
 |
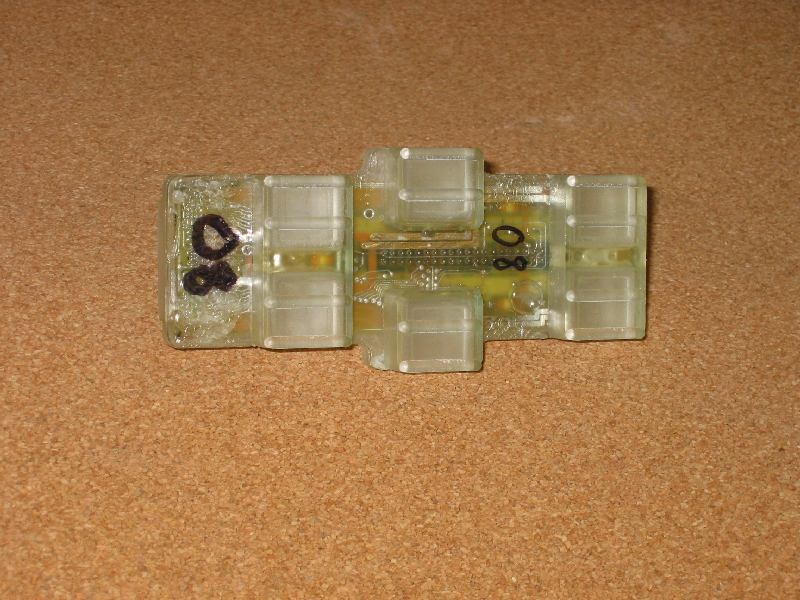
| Для упрощения внутренних электрических соединений была разработана и внедрена в тело печатная плата. |
 |
| Вдоль позвоночника роботов проходит шина ввода/вывода для доступа к внутренней печатной плате. Она обеспечивает подключение как основных компонентов, так и дополнительных, например, челюстей, светочувствительных датчиков, компаса, камеры и т.д. |
 |
| Для того, чтобы определить необходимый диапазон упругости ног, были разработаны специальные взаимозаменяемые гибкие соединения ног. Они позволяют изменить жесткость ног между двумя экспериментами в считанные секунды. |
 |
Управление
| Микроконтроллер TERN AE86 – это мозг Спрольчиков. Он состоит из процессора AMD186, 19-ти аналого-цифровых входных линий, трех таймеров и 5 внешних триггеров (цифровые линии ввода), 14-ти программируемых портов ввода/вывода и двух последовательных, и некоторых других менее важных элементов. Для питания требуется стабилизированный источник с напряжением 5 В. |
 |
| Интерфейсная плата Спрольчиков (ИПС) нужна для соединения платы микроконтроллера со стационарным компьютером (необязательно, но удобно для управления), с самим Спрольчиком, контроллером сервомотора и двумя интегральными схемами H-мостов. ИПС также обеспечивает удобный доступ ко всем линиям ввода вывода микроконтроллера, что удобно при добавлении на Спрольчик новых элементов. |
 |
Экспериментальная установка
Сейчас Спрольчиком можно управлять с помощью:
- Джойстика
- Светочувствительных датчиков
- Компаса
- Датчиков давления 6-ти ног.

The Sprawlettes
|
|