Последовательный интерфейс
Здесь описано, как изготовить последовательный кабель, при помощи которого можно соединить робот Roomba с обычным компьютером Mac/PC. Roomba сделан в октябре 2005 года, поэтому в нем имеется современный электронный и программный интерфейс, позволяющий удаленно управлять поведением робота и считывать информацию с его датчиков. Этот интерфейс называется Roomba Serial Control Interface (последовательный управляющий интерфейс Roomba), или Roomba SCI. В Интернете есть свободно распространяемое программное обеспечение для управления Roomba.
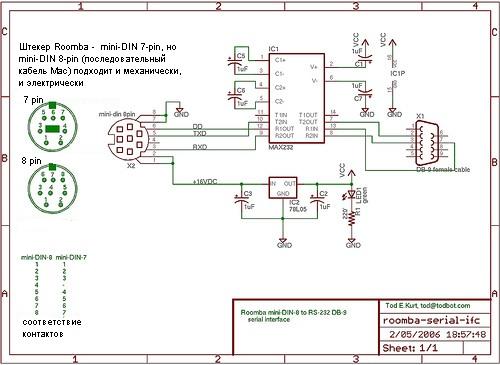
Проблема состоит в том, что выходной разъем на Roomba - это достаточно нестандартный mini-DIN 7-pin. Часто на форумах можно встретить сообщения о том, как тяжело раздобыть этот редкий разъем. Однако как выяснилось, штекер mini-DIN 8-pin прекрасно подходит к розетке 7-pin: центральный штырь штекера 8-pin помещается в отверстие в центре разъема 7-pin. А кабель со штекером mini-DIN 8-pin раздобыть гораздо проще. Например, можно использовать высокоскоростные последовательные кабели, выпускавшиеся в 90-х для компьютеров Macintosh.
Теперь мы располагаем кабелем, который подходит к разъему робота, осталось подсоединить его к компьютеру. Однако подключение осуществляется через последовательный порт RS-232, которого нет на большинстве компьютеров. Эта проблема решается при помощи Keyspan High Speed USB Serial Adapter (высокоскоростной последовательный Keyspan-USB адаптер).
Последняя трудность заключается в том, что порт на Roomba не удовлетворяет стандартам порта RS-232. Необходимо собрать электрическую плату, которая бы осуществляла их согласование.
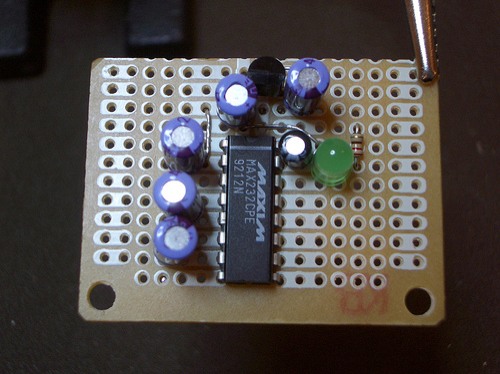
Простейшая цепь состоит из регулятора напряжения 7805 +5 В и приемопередатчика MAX232 RS-232, подходящих конденсаторов и светодиодного индикатора работы.
Список нужных деталей

- 1 x кабель Mac mini-din 8-pin
- 1 x последовательный кабель с розеткой DB9 9-pin
- 1 x регулятор напряжения 78L05 +5VDC (5 В постоянного тока)
- 1 x приемопередатчик MAX232 RS-232
- 1 x зеленый светодиод
- 1 x резистор 220 Ом
- 6 x электролитный конденсатор1 мкФ
- 1 x печатная плата для PС
Используемые при работе инструменты приведены на фотографии

Обрезание кабеля

Срежьте пластиковое покрытие и зачистите несколько сантиметров кабеля. Проверьте, какой цвет провода соответствует каждому штырьку на штекере, т.к. у каждого кабеля может быть свое отображение цвет-контакт.
Диаграмма электросхемы
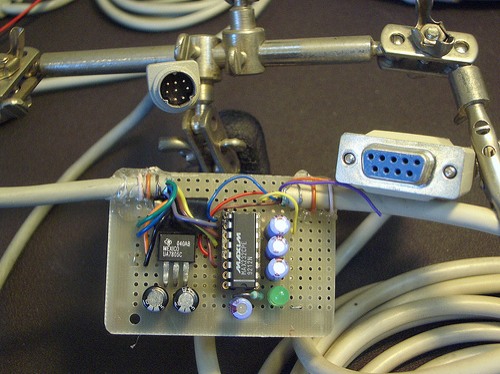
Помещение компонент на печатную плату
Разрежьте плату напополам, так как понадобится только половина пространства. Поместите чип так, чтобы он соединял две вертикальные шины, а остальные элементы расположите вокруг, стараясь минимизировать количество проводов. Также сделайте несколько контрольных точек для замера напряжений.

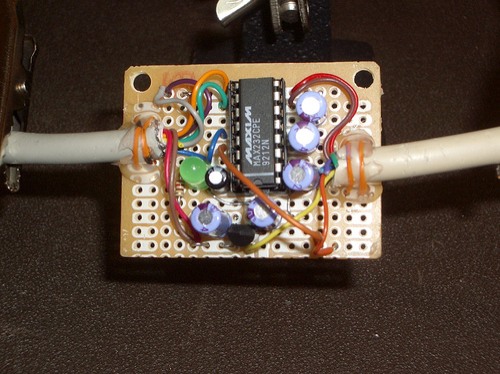
Используя диаграмму цвет-контакт для конкретного кабеля, расположите провода в соответствии со схемой, припаяйте их и приклейте к плате для большей прочности.
Проверка напряжения
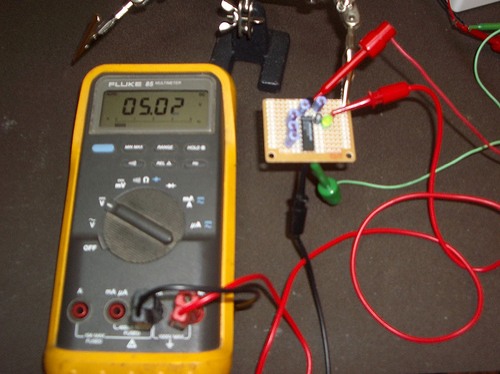
После того, как все контакты запаяны, подайте 9 В от источника постоянного тока для запитывания схемы и проверьте напряжения. Светодиод должен засветиться, а на регуляторе напряжения должно быть +5 В.

Свечение светодиода означает, что собранная плата получает напряжение от Roomba.
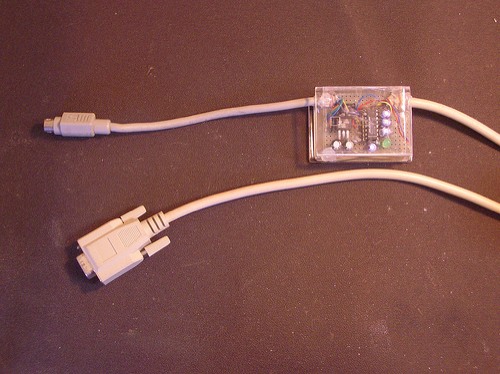
Затем поместите плату в какой-нибудь футляр и снова подайте +9 В. Померьте напряжение на каждом проводе кабеля, чтобы убедиться, что собранная схема не сожжет Roomba или порт компьютера.

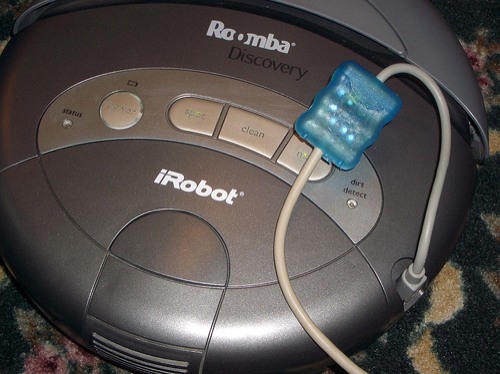
Скачайте программное обеспечение и управляйте своим роботом. Более подробно о программном обеспечении можно узнать здесь.
Интерфейс Bluetooth
Итак, выше описано, как осуществить управление Roomba при помощи интерфейса последовательного порта. Если добавить последовательный адаптер Bluetooth, то можно будет управлять роботом дистанционно. При этом, программное обеспечение будет по-прежнему работать, поскольку новый интерфейс воспринимается операционной системой как обычный последовательный порт.
Используемые детали
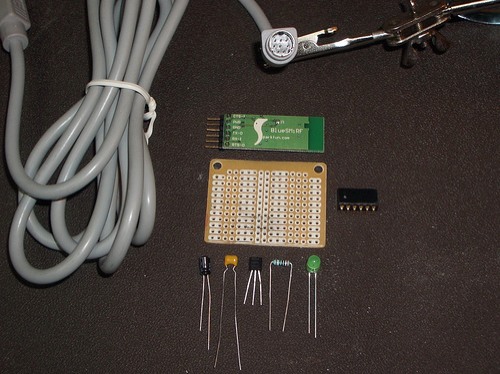
Процесс изготовления указан на нижеприведенных фотографиях.
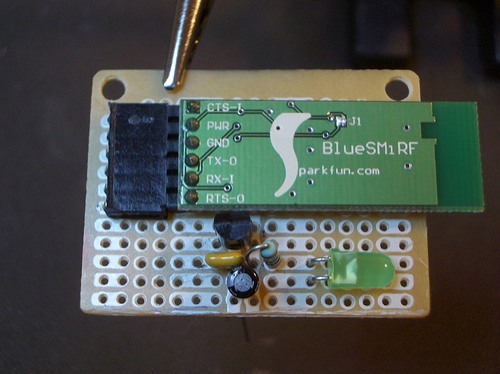
Если BlueSMiRF сможет получить +16 В постоянного тока от Roomba, то регулятор напряжения не понадобится, и можно будет сэкономить много места.


После проверки согласованности контактов в кабеле и напряжений на плате, подключите BlueSMiRF к Roomba и компьютеру. Поместите устройство в подходящий футляр.
 Источник:
http://www.makezine.com/blog/archive/2006/02/how_to_make_a_roomba_serial_in.html,
Источник:
http://www.makezine.com/blog/archive/2006/02/how_to_make_a_roomba_serial_in.html,
http://www.makezine.com/blog/archive/2006/02/how_to_roomba_bluetooth_interf.html











