Перевод статьи Роберта Вудхеда (Robert Woodhead), директора Metal Munching Maniacs, в которой он пошагово описывает создание боевого робота для соревнований. Этот робота, названный им Total Offensive, выиграл Национальные соревнования в Сан-Франциско в 2004 году.
Итак, вы решились создать робота, но слышали, что это слишком сложно. У меня есть для вас очень приятное известие. Чтобы сделать конкурентоспособного боевого робота, требуются минимальные технические навыки, приобрести которые гораздо проще, чем вы думаете.
Например, я – специалист по компьютерам и ни разу в жизни не сталкивался с необходимостью смастерить что-нибудь своими руками. Это продолжалось до тех пор, пока мои дети не пришли ко мне и не сказали: "Папа, либо ты делаешь нам робота, либо мы ищем другого отца, который нам его сделает". Так мне и пришлось узнать, чем же отличается втулка от лерки.
Но они пришли и спросили, и мне пришлось все это узнать, а через год или около того (после многих неудачных попыток) у меня получился неплохой сверхлегкий клиновидный робот Anorexia (я дал ему это имя, потому что он вышел такой маленький) (Anorexia – "потеря аппетита"). Этого робота можно увидеть на DVD, выпущенном Robot Club & Grill MAYHEM. Потом Anorexia зацепилась винтом за потолок и в процессе ремонта превратилась в неплохой погрузчик, который был бы еще лучше, если бы я аккуратнее водил машину.
(Кстати, если кликнуть любую из маленьких картинок, то можно будет посмотреть увеличенную версию.)
Итак, не откладывая дело в долгий ящик, приступаем к делу. В этом году дети опять пришли ко мне и заявили, что теперь им нужен свой собственный робот, у которого просто обязано быть хоть какое-нибудь вооружение. Так мне пришлось вернуться к верстаку.
Дело усложнялось тем, что я хотел, чтобы робота было просто сделать, чтобы можно было использовать многие имевшиеся у меня запасные детали (вроде батарей, контроллеров скорости и т.д.) и чтобы для различных "наворочек" использовались простые компоненты: так проще и быстрее. Время у меня было ограничено, ведь до отборочных соревнований среди юго-западных штатов оставалось всего несколько месяцев.
Этот спорт (а создание боевого робота можно смело отнести к спорту) постоянно развивается, и сейчас можно запросто достать множество проверенных деталей, с помощью которых даже новичок сумеет сконструировать неплохого робота. Другими словами, у меня появились базовые навыки, но сделать большую передаточную коробку для какого-нибудь крутящегося вооружения я не в состоянии. К счастью, ни мне, ни вам этого не требуется.
Разрабатывая конструкцию робота, мы решили действовать по принципу, что лучшая защита – это нападение. Все ресурсы направлены на оружие – лезвие газонокосилки, которое приводится в движение электромотором Magmotor. Я экономил каждый грамм, чтобы сделать лезвие максимально тяжелым, и в конце концов, получилась целая глыба из инструментальной стали весом 6,9 фунта (3,13 килограмма) длиной 22 дюйма (56 сантиметров).
В основном, я пользовался стандартными деталями, и если бы конструкция получилась неудачной, множество элементов можно было бы заменить на более подходящие. Решение оказалось правильным: в статье описывается четвертая версия робота.
Самая первая модель представляла собой что-то вроде буквы "Т", сделанной из алюминия с множеством отверстий, чтобы уменьшить вес. Ведущие колеса и плоскость вращения лезвия были направлены под углом друг к другу, благодаря чему робот мог легко поворачивать, совсем не двигая оружие. Правда, при движении вперед-назад раздавался скрежет, как будто колют орехи. Нельзя сказать, что это наилучшая конструкция, но при катастрофической нехватке защиты возможность повернуться к врагу самой опасной своей стороной казалась мне большим достоинством.
За две недели до первого выступления пришлось произвести переоценку конструкции. При движении робота втулка передаточной коробки задевала землю, из-за чего он терял в маневренности. Наклонно расположенные колеса позволяли роботу развернуться на пятачке, но при движении вперед-назад возникали проблемы.
Итак, я вернулся к чертежной доске, и через некоторое время у меня получился робот со смещенной осью вращения, немного напоминающий легкий 2EZ. По крайней мере, потренировался в сварке.
На соревнованиях выяснилось, что робота нужно было назвать "Камикадзе", потому что после каждого удара он переворачивался и оказывался полностью беззащитным. После одного из ударов он прокатился по всей арене.
Итак, пришлось опять вернуться к чертежной доске.
На этот раз получилась упрощенная версия первой модели. Ведущие колеса и втулка оружия располагались на одной линии, поэтому он мог свободно поворачиваться вокруг этой оси, и не было никаких проблем при движении вперед-назад. Рама была сделана из алюминия с тавровым профилем с несколькими отверстиями для уменьшения веса, а кожух из UHMW-пластика (пластик со сверхвысокой молекулярной массой) защищал вращающиеся части.
На соревнованиях наш робот победил со счетом 5-0, из которых 4 были нокаутами, и не только оказался победителем, но и получил приглашение на национальные соревнования 2004 года. Ура! Мы нашли конструкцию победителя, или нет? Правильно, НЕТ. На вторых соревнованиях была выявлена фатальная ошибка. В каждом бою рама выдерживала неимоверные удары, подбрасывавшие робота в воздух и кидавшие его обратно на землю. А лезвие и передаточная коробка были расположены между приводными колесами, на длинной алюминиевой балке, которая погнулась. Удары передавались на ведущие моторы, и в конце концов, сломались и они.
Весь турнир я провел над "тонкой" инженерной работой кувалдой, выправляя раму и заменяя моторы. В финальном бою накрылись оба ведущих мотора, а рама так погнулась, что стала задевать пол арены. Последнее нас и спасло. Мой сын Джеймс, водитель робота, обнаружил, что, включая и выключая оружие, можно двигать и робота и, соответственно, поворачивать его. Тот бой мы выиграли, и в финальном зачете оказались на третьем месте.
Итак, мы вернулись к чертежной доске и приступили к созданию рамы, достаточно жесткой, чтобы выдержать удары, но и достаточно легкой, чтобы не пришлось отказываться от трехкилограммового лезвия. И теперь я попробую убедить вас, насколько это просто – сделать робота.
Перед тем как приступить, несколько слов о технике безопасности. Недостаточно быть осторожным во время битвы своего робота, гораздо важнее дожить до нее, создавая робота. В частности, это означает постоянное использование защитного оборудования во время работы, например, защитных очков. НИКОГДА не снимайте их, даже если вы не пользуетесь мощными инструментами. Вы не поверите, насколько легко повредить глаза во время любой простой работы, например, забивая гвоздь. Что, и правда не верите? Сделайте в Google поиск по фразе "гвоздь в глазу". Ну как? Если и это не убедило вас быть осторожными, тогда я умываю руки. Обязательно работайте только в подходящей одежде, с защитой ног и рук. Если вы не знаете, как правильно пользоваться инструментом, не приближайтесь к нему, пока не ознакомитесь с инструкцией.
Сделайте одолжение (самому себе!): повесьте защитные очки на дверь мастерской и даже не входите туда, не надев их. Техника безопасности – это то, чему мы, Metal Munching Maniacs, уделяем очень большое внимание: если вы ослепнете, то не сможете смотреть наши DVD, а с откромсанными руками трудно обращаться с пультом дистанционного управления. Работа наших служащих зависит от того, повредите вы себе что-нибудь, или нет. Нет смысла тратить время на объяснения того, что создание боевого робота – очень опасное занятие, особенно если это приходится объяснять беспечному идиоту. Если вам оно надо, - рискуйте, но когда просверлите себе дыру в пальце, нас просьба не обвинять.
Теперь я хочу представить вам нового друга: знакомьтесь - это штангенциркуль. Если у вас его еще нет, обязательно зайдите в Harbor Freight и купите подходящий (обычная модель длиной 6 дюймов (15 сантиметров)). Покупка недорогих инструментов в Harbor Freight – это своего рода ритуал, без которого невозможно называться полноправным создателем боевых роботов. К концу статьи у вас появится целый список вещей, которые захочется приобрести в этом магазине.
Штангенциркуль позволяет очень точно измерять и размечать разные детали. Это позволит вам сделать своими руками гораздо больше, чем вы можете представить. Я поставил в мастерскую небольшой токарно-фрезерный станок Sherline и решил сделать весь каркас самостоятельно. Вот на какие жертвы приходится идти, если хочется втянуть вас в этот спорт и заставить покупать наши DVD.
При разработке робота многие становятся просто помешанными на системе РКК (Разработка конструкции с помощью компьютера) (CAD – Computer Aided Design). Я же предпочитаю пользоваться другим методом с тем же названием РКК (Разработка конструкции с помощью карточек; CAD – Card Aided Design). Из карточек вырезаются различные элементы и по-разному совмещаются между собой, чтобы представить, как робот будет выглядеть на самом деле. Когда получается что-нибудь стоящее, чертеж создается в какой-нибудь простой графической программе на моем Macintosh.
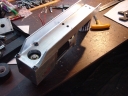
Новая конструкция робота Totally Offensive многое унаследовала от своих предшественников с незначительными улучшениями, благодаря опыту, приобретенному на соревнованиях. Оружие расположено спереди, ведущие моторы сзади, а вал оружия касается земли (таким образом, немного снижается вес и, я надеюсь, изгибающие моменты, действующие на раму). Рама представляет собой алюминиевый швеллер П-образного профиля шириной 3 дюйма (7,5 см) в форме буквы "Т". Если бы у меня не нашлось подходящего в мастерской, пришлось бы поискать на ближайшем складе или заказать подходящий в Online Metals (там даже можно вырезать его так, как нужно). Удобно то, что при достаточной прочности внутри швеллера остается достаточно места для различных элементов. На верхней перекладине у меня расположены батареи (под которыми находится мотор оружия), а контроллеры скорости находятся на задней перекладине. Все закрыто кожухом из UHMW-пластика (потрясающая вещь, я его достаю в McMaster-Carr). Кстати, это очень хороший магазин запчастей и высококачественных приборов, не самый дешевый, но с хорошим обслуживанием и огромным выбором.
День 1: Устанавливаем передаточную коробку и мотор оружия
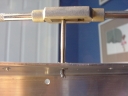
Итак, приступим. Сначала нужно циркулярной пилой (легкая циркулярная пила абсолютно необходима для работы с металлом) обработать перекладину для установки батарей и оружия. В нашем случае это брус длиной 15 дюймов (38 см). На рисунке показано, как установить редуктор Whyachi TWM3RS с электромотором и задним щитком.
Редуктор удерживается на швеллере четырьмя болтами. На самом деле, это винты с потайной головкой. Оказывается, все, что мы с вами понимали под болтом, в действительности является одной из множества разновидностей винтов. Те болты, которые продаются в Home Depot – это винты с шестигранной головкой. Впрочем, винт можно легко превратить в болт, если накрутить на него гайку. Вот такая неприятность: нет гайки - нет болта, одни винты. Не знаю, поверите вы или нет, но в Департаменте национальной безопасности США есть документ объемом в 21 страницу, полностью описывающий отличия болта от винта. В виде спорта, которым мы с вами занимаемся, всегда найдутся удивительные вещи. После этого отступления я для удобочитаемости буду называть их все болтами. Просто хотелось показать, что я не лох, который не знает разницы между болтом и винтом.
В любом случае придется сделать отверстия в швеллере для болтов. К счастью, в техническом описании редуктора точно указано расположение отверстий для крепежных болтов, осталось только сделать их там, где надо. Мой станок позволяет делать отверстия с точностью до 0,001 дюйма (0,02 мм), но такой точности не требуется. Несколько сотых долей дюйма (около половины миллиметра) будет вполне нормально. Вот где штангенциркуль оказывается просто незаменимым.
Сначала маркером (очень удобно: он наносит тонкий легкостирающийся слой краски) я закрасил область примерного расположения отверстий. Потом определил местоположение отверстий, нарисовав с помощью штангенциркуля линии, пересекающиеся в нужных точках. Хорошим тоном будет отмерять все линии относительно одного угла, выбранного опорным. Я рисовал все горизонтальные линии относительно нижнего края, а вертикальные относительно правого бокового.
После того, как определено местоположение отверстий, центровочной дрелью делаются небольшие отверстия в каждой точке. Центровочная дрель – это такая специальная удобная дрель с небольшим сверлом, которая практически не "гуляет" во время вращения. Сначала этим сверлом делаются небольшие отверстия, и проверяется правильность их расположения. Если отверстия получились немного смещенными, можно продолжать сверлить с легким нажимом в нужную сторону. Немного практики, и только с помощью своих глаз и центровочной дрели можно научиться делать отверстия, которые направят основное сверло с точностью до сотых долей дюйма (полмиллиметра).
Когда сделаны центровочные отверстия, можно браться за обычную дрель (измерьте штангенциркулем диаметр болта и возьмите сверло на один размер больше: в наборах сверла обычно с нужным шагом) и аккуратно просверлить отверстия. У меня случилась одна небольшая проблема. Два отверстия для болтов передней части редуктора оказались так близко к краю, что задели вертикальные ребра швеллера. Пришлось эту часть спилить. Можно было потратить кучу времени и отпилить ее ножовкой, но гораздо проще оказалось зажать диск пилы в ручном точиле и отпилить его, а потом зачистить все абразивным кругом. Точило – это очень удобная вещь, но не забывайте надевать очки, перчатки и маску: металл летит во все стороны, а ваши легкие – это последнее место, где ему можно оказаться. Примерка показала, что и для задних болтов нужно сделать небольшой вырез в вертикальном ребре, чтобы они встали ровно, не касаясь стенок. Еще и редуктор сдвинулся относительно стенки канала из-за того, что отверстия для болтов были сделаны недостаточно точно.
Чтобы исправить эту погрешность, я просто взял одно отверстие, которое, как мне показалось, было сделано наиболее правильно, прикрутил редуктор одним болтом через это отверстие и определил, куда и насколько нужно сместить остальные отверстия. Пара минут работы напильником, и все встало на свои места.
Потом надо было сделать еще 3 отверстия для болтов, чтобы закрепить заднюю стенку крепления мотора. Это просто. Поставив на место мотор и редуктор, нужно провести линию на задней части стенки. Потом снять мотор с редуктором, с помощью штангенциркуля определить местоположение отверстий, сделать центровочные отверстия, затем рабочие. После того, как я все это проделал, все подошло отлично, ничего не пришлось исправлять.
Затем кольцевой пилой я сделал большую дыру в швеллере напротив верхнего подшипника редуктора. В этом месте на металл больших нагрузок не приходится, если его убрать, то немного экономится вес, а доступный винт крепления вала – это полезно: например, может понадобиться снять сам вал, не снимая весь редуктор. Плюс можно потренироваться работать с кольцевой пилой, тоже интересно. Еще три отверстия я сделал в верхней части швеллера с другой стороны (в том месте, где он будет крепиться ко второму бруску, составляющему верхнюю часть буквы "Т"). Неплохо для двух часов работы, но на первый день хватит.
День 2: Верхняя часть буквы Т
Перед тем, как приступить к обработке второй части швеллера, неплохо бы закончить то, что осталось несделанным с первого дня. Нужно просверлить отверстия в швеллере и нарезать в них резьбу для крепления пластикового кожуха, который будет сделан позже.
Нарезание резьбы – один из тех базовых навыков, которыми должен обладать каждый профессиональный создатель роботов. Нарезав резьбу в отверстии, можно закрутить туда болт, и гайка совсем не понадобится. На самом деле это просто.
Сначала нужно просверлить отверстие правильного диаметра, который зависит от размера болта и его резьбы. Его можно определить по таблице значений размеров резьбы. Для болтов 10-32 (размер 10, 32 нити на дюйм) в алюминии нужно просверлить отверстие диаметром 0,159 дюйма (4 мм), что соответствует сверлу № 21. Кроме обычных дробных размеров (в дюймах) для сверл, которыми пользуется большинство, бывает еще множество буквенных или числовых обозначений.
После этого нужно выбрать метчик. Разумеется, это метчик 10-32, как и болт, но существует множество различных их типов для разных обстоятельств. К счастью, большую часть времени (по некоторым оценкам 99,44%) вы будете нарезать отверстие одним из двух типов: черновым и чистовым. Метчик для чернового прохода немного скошен с краю, и резьбу очень просто начать. Но этим метчиком нельзя нарезать резьбу на дне глухого отверстия (отверстие с "дном", другими словами, не сквозное отверстие). Поэтому вам нужно сделать резьбу, насколько это возможно, черновым метчиком, потом поменять метчик на чистовой и доделать оставшиеся несколько нитей резьбы.
Так как мне нужно было нарезать резьбу в сквозном отверстии, потребовался только черновой метчик. При нарезании резьбы в отверстие обычно добавляется немного специальной жидкости (например, машинное масло). Она смазывает края, и резать металл становится легче, также легче удаляются металлические отходы. После этого в отверстие вставляется метчик и осторожно поворачивается по пол-оборота за раз.
С метчиками нужно быть очень осторожным. Они очень твердые, чтобы смогли резать металл, но, следовательно, и очень хрупкие. Если неудачно уронить метчик на твердый пол, то он разлетится, как стекло. Если случайно приложить боковое усилие или продолжать крутить метчик после того, как он упрется в дно отверстия, то инструмент может легко сломаться. Вытаскивать сломанный метчик из отверстия – это такая головная боль, которой даже врагу не пожелаешь (иногда их приходится растворять азотной кислотой). Поэтому будьте осторожны, при неожиданно возросшем сопротивлении сделайте пару оборотов назад и попробуйте снова.
Я обычно делаю 4 полуоборота, потом один полуоборот назад, чтобы застрявшие под метчиком металлические опилки попали в специальные прорези на метчике и не мешали резать. Если нужно нарезать резьбу в глухом отверстии, то после 6-8 полных оборотов я вынимаю метчик, прочищаю его, продуваю отверстие сжатым воздухом, добавляю масла и потом продолжаю. Советы экспертов по поводу нарезания резьбы можно посмотреть в Руководстве по нарезанию резьбы на форуме BattleBots.
Что делать со вторым брусом: отпилить кусок длиной 16 дюймов (40,6 см), разметить, просверлить отверстия, нарезать в них резьбу так, чтобы можно было прикрутить его к основному брусу. У самых внимательных читателей, наверное, возникло возражение: "Эти болты не выдержат напряжение во время боя: они либо сами сломаются, либо резьба сорвется". Это действительно так, но у них задача стоит совсем другая. На этой стадии они нужны, чтобы удержать детали вместе, проверить, как они подходят друг к другу. После окончательной подгонки, когда все встанет на свои места, можно будет сварить раму в одно целое.
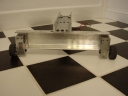
Соединив вместе раму, можно устанавливать приводные механизмы. Для этого мне опять подошел набор из редуктора и колес Whyachi T-Box.
От верха редуктора до нижнего края вала оружия - 4,625 дюйма (11,7 см), это расстояние должно совпадать с высотой от пола швеллера, на котором держатся моторы. Так как в моей конструкции редуктор находится на высоте 4,034 дюйма (10,3 см), то мне нужно сдвинуть его вниз на 0,591 дюйма (1,4 см). Я решил сдвинуть его на 0,65 дюйма (1,65 см), чтобы с новыми шинами лезвие было чуть наклонено вперед, а по мере износа лезвие будет все больше отклоняться назад и выравниваться. На этом этапе получилось так, что задействованы оказались два из трех крепежных отверстий, но позже, установив все на место, можно будет закрепить получше. На одной из первых стадий создания Totally Offensive я также нарезал резьбу в отверстиях для болтов крепления мотора со стороны редуктора, а позже я собираюсь приварить дополнительные пластины для крепления мотора.
При предварительной проверке качества крепления деталей я просто прикрутил моторы спереди бруса, потом, настроив все как надо, сделал вырезы на нижнем ребре бруса с помощью точила и диска пилы и поставил моторы на место. Посмотрите, он выглядит уже как настоящий робот! Давайте установим оружие и посмотрим, как все это работает.
Суммарное время работы над проектом: 5 часов.
День 3: Устанавливаем моторы
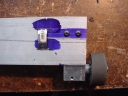
Одни из самых серьезных недостатков предыдущих версий робота заключался в креплении моторов. Они соединялись с редуктором парой небольших болтов, и каждый серьезный удар передавался на заглушки моторов и корежил их, из-за чего ослаблялась их крышка и даже могла погнуться оболочка. Чтобы уменьшить эту нагрузку, надо прикрутить мотор к раме так же прочно, как и к редуктору. Можно было решить проблему, сделав специальное крепление для мотора, прижимающее его к раме, но проще воспользоваться тем, что уже есть: обычным хомутом, который можно купить в Home Depot. Прорезать пару пазов в раме, протянуть туда хомут, закрепить мотор и все готово.
Липучки на раме играют сразу две роли: во-первых, моторы немного меньше по диаметру, чем редуктор, и липучки заполняют зазор, позволяя жестко прижать моторы и не погнуть их. Во-вторых, они изолируют моторы и спасут их в случае короткого замыкания на раму, которое вполне может случиться во время боя. С этой же целью я обмотал крышку мотора изолентой. Возможно, стоит добавить немного ленты и под зажим.
Суммарное время работы над проектом: 6,5 часов.
День 4: Устанавливаем контроллеры скорости
Контроллеры скорости – это вещь, необходимая каждому боевому роботу. Они получают сигнал от дистанционного радиопередатчика и преобразуют его в пропорциональное напряжение, определяющее скорость и направление вращения колес: вперед, назад и с той величиной, которая вам нужна. Принцип их работы просто гениальный: обычно они несколько сот или даже тысяч раз в секунду включают и выключают ток, подаваемый на моторы, частота отключения зависит от принимаемого сигнала. Например, если пришла команда: "полный вперед", тогда ток отключаться не будет, если команда "скорость на половину величины", тогда половину времени контроллер будет отключен. Переключение происходит очень быстро, и с точки зрения инерционного мотора, на него поступает постоянный ток, амплитуда которого изменяется когда нужно ехать быстрее или медленнее. Чтобы включить задний ход, полярность контроллера меняется, и направление вращения тоже становится противоположным.
Многие наши коллеги верят в существовании духа, благодаря которому работают все электронные приборы робота. Когда дух покидает робот (несведущие люди считают это дымом), робот перестает работать. Чаще всего дух оставляет робота, когда у того сгорает контроллер скорости. Довольно забавно, но может вылиться в кругленькую сумму.
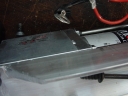
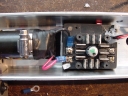
Для своего робота я взял контроллеры IFI Robotics Victor 883. Они слишком мощные для моих моторов (Monster Max RC Truck motors), но они просто валялись рядом ненужные, и почему бы ими не воспользоваться? В обычном режиме работы они даже не нагреваются, и кулеры я использовать не стал.
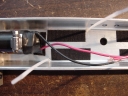
Поставить их достаточно просто: разметить и просверлить крепежные отверстия (я сделал дополнительное отверстие в раме для подвода кабелей наверх) и прикрепить контроллеры к раме на липучках. Так они не только удерживаются на месте, но и удары немного смягчаются. Для большей надежности я прижал их (гениальная идея!) парой стяжек от проводов: одна используется вместо винта, а головка второй вместо гайки. Это просто, дешево, не ослабится пока вы ее сами не ослабите и, кроме того, стяжки изолирующие и защищают контроллеры от замыкания на раму.
Следующим шагом нужно укоротить провода моторов до нужной длины, свить кольцо на конце и прикрутить его к контактам контроллеров. Особо наблюдательные, наверное, заметили, что моторы я соединил одинаково, а левая и правая пара редуктор-мотор зеркально отражают друг друга, поэтому при одинаковом сигнале от радиопередатчика моторы будут вращаться в разные стороны. Все очень просто: мне лень запоминать нужную полярность соединения - просто включив первый раз, я смотрю, в какую сторону крутятся моторы и, если нужно, меняю контакты на одном из контроллеров.
Наверное, вы заметили, что я не пожалел термоклея для контактов модуляции ширины импульса контроллера; это чтобы они не вылетали – нужны мне лишние неприятности?
Соединять верхние контакты контроллеров нужно очень внимательно: ошибка может дорого обойтись. Просто запомните: КРАСНЫЙ – к ПЛЮСУ, ЧЕРНЫЙ – ЗЕМЛЯ (или МИНУС). На этой стадии я еще не решил, как подводить питание к моторам, но во время тестирования они просто свободно висят. Да, кстати, если возможно, скручивайте кабели питания попарно – помогает избавиться от наводок.
Еще одно важное замечание: достаньте хорошие щипцы для обжимки и зачистки проводов. Они избавят от многих неприятностей, не говоря уж о страданиях от проигранного из-за ослабившихся проводов боя (проверено на собственном опыте). Хорошие щипцы стоят 20-25 долларов, но они действительно того стоят.
Суммарное время работы над проектом: 8,5 часов.
День 5: Тестирование электросхемы
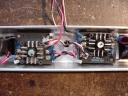
Сейчас нам осталось только присоединить еще несколько деталей, все провода - и получится работающий робот. Сначала я просверлил и нарезал резьбу в отверстиях для крепления контактора Whyachi C1 , который используется для управления мотором оружия. На самом деле, это просто большое реле, оно регулируется переключателем Team Delta D-Switch, который, в свою очередь, управляется по одному из каналов дистанционного управления. Я не счел нужным снимать мотор и редуктор во время этой работы, а просто закрыл их пластиковой коробкой, чтобы уберечь от металлических опилок.
Контактор расположен под передней балкой рамы сзади пластины крепления мотора, он достаточно хорошо защищен от посягательств внешнего мира вращающимся лезвием. Повредить его может только что-нибудь, скользнувшее по лезвию сверху, поэтому стоит добавить хоть какой-нибудь защитный алюминиевый или пластиковый кожух (в зависимости от запаса по весу).
Так как электрическая схема этого робота полностью аналогична предыдущей модели, придумывать ничего нового не пришлось, нужно только соединить все провода, вывести контакты наверх и все проверить.
Контроллеры скорости занимают два первых контакта радиоприемника, а выключатель оружия соединяется с каналом 6, но это определяется конструкцией моей радиосистемы. Одно из больших преимуществ использования хорошего радио (например, Futaba 9-CAP) – это возможность настраивать робота, регулируя радио.
Основная работа с радио заключается в настройке смешения сигналов. Наиболее часто встречается пульт от модели самолета, в нем все управление движением осуществляется одним джойстиком: и разгон и поворот. Чтобы разогнаться, нужно нажать джойстик вперед, затормозить – назад, повернуть – вправо или влево. Получается, что один канал отвечает за движение вперед – назад, а второй – за поворот.
На самом же деле нам нужно управлять отдельно левым и правым моторами. Если у вас обычное радио, то для решения задачи придется покупать модуль смешения, а в радио типа 9CAP можно настроить смешение в самом радио.
После того, как все соединено, но до подачи питания, проверьте отсутствие короткого замыкания на раму от всех элементов, находящихся под напряжением. Особенное внимание нужно уделить моторам и контроллерам скорости. Это займет всего пару минут, но избавит вас от очень дорогого дыма. Чтобы колеса вращались в воздухе, под редуктор можно подложить пару кубиков. Еще я отсоединил мотор оружия: я знаю, что он работает, и лишний раз включать его в помещении не стоит.
Потом я осторожно подал питание на радио, потом основное. Дыма нет, уже хорошо: можно проверять моторы. Как и ожидалось, у одного из них (левого) нужно поменять полярность. После того, как это сделано, робот готов к настоящей проверке.
Батареи, которыми я пользовался (24 В, емкость 3,6 А-часов) подходили по размеру, но имели неправильную форму. После того, как основная часть была собрана и проверена, я отправил их в Robotic Power Solutions (Служба технической поддержки роботов), чтобы их разделили и заменили на два модуля по 12 В. В окончательной конструкции батареи будут уже и длиннее, чем использовавшиеся для предварительной проверки. Еще в списке улучшений робота есть замена никель-кадмиевых батарей на никель-металлгидридные, что позволит без увеличения веса повысить напряжение от 24 до 36 Вольт, а значит, и значительно поднять скорость вращения оружия. Но это позже.
В гараж, на проверку! Короткий видео ролик в формате quicktime можно скачать здесь. На заднем плане виден каркас одного из предыдущих, менее удачных роботов и мои колени, которые моя жена считает необыкновенно привлекательными.
Что бы вы думали? Все хорошо! Даже на бетонном полу, который по сравнению со специальным металлизированным полом арены очень скользкий. Во время проверки скорость вращения была более чем в 5 раз меньше максимально возможной, но колеса все равно прокручивались. Неожиданностью это не оказалось, ведь большая часть веса робота сосредоточена в передней части, да и проблем (я надеюсь) это не составит, ведь робот предназначен для того, чтобы подкрасться к противнику и искрошить его, а не гоняться за ним по всей арене.
День 6: Весело варим металл
Потратив пару часов на треугольные ребра жесткости для рамы, можно ее сварить. Я новичок в сварке и сварочного аппарата у меня нет, поэтому мы с сыном взяли все детали и съездили в Уилмингтон в ProFab, которая обычно располагается вместе с AnimEigo. Со мной поехал и мой сын Джеймс (главный водитель робота), чтобы узнать, что это вообще такое: варить металл.
Сварка робота осуществлялась вольфрамовым электродом в инертном газе. Область сварки находится в аргоновой атмосфере, а между вольфрамовым электродом и металлом образуется электрическая дуга. Для усиления сварочного шва добавляется металл. Этот метод сварки медленнее, чем обычно используемая сварка металлическим плавящимся электродом, но результат получается лучше, особенно если работу делает профессионал.
Мы не просто сварили вместе части рамы, но и добавили несколько треугольных элементов (про которые я упомянул в начале дня) для большей жесткости конструкции, чтобы отвести ударные напряжения от основных узлов. Еще мы приварили пару ограничителей, чтобы редуктор оружия не сдвигался из стороны в сторону (это нужно, чтобы уменьшить сдвиговые напряжения, действующие на крепежные болты – они могут не выдержать большие усилия). И, наконец, пара торцевых пластин позволила нам закрепить редукторы моторов более надежно и защитить их.
Привезя раму домой, я засунул ее в духовку (350 °F (180 °С) на 8 часов, потом охладить), чтобы искусственно состарить металл. Во время сварки материал сильно нагревается и ослабевает около сварочных швов, но со временем металл старится и становится более прочным. Если в течение нескольких часов его прогревать, то этот процесс ускорится. Есть более радикальное воздействие, оно называется термическая закалка шва, которая лучше усиливает металл, но требуется большая температура и есть риск деформации изделия (если делает любитель), поэтому я остановился на том, что можно сделать в домашних условиях. Надеюсь, что индейки из робота не получилось, хотя готовился он почти так же.
День 7: Это защитный кожух, как бы он где ни назывался
Потратим еще пару часов на установку нескольких кожухов из жесткого SHMW пластика для защиты разных элементов. Этот пластик гибкий, но очень прочный, для наших целей он подходит идеально. Искривленные пластиковые листы защитят внутренности робота от осколков и немного смягчат удары. Вырезав ножницами пластиковые листы, я пробойником отметил места для отверстий крепления кожуха к раме. Пластик достаточно мягкий, в нем легко сделать проколы вместо центрирования отверстий дрелью.
Просверлив отверстия, нужно проверить точность их соответствия дыркам на раме. Некоторые отверстия совпали недостаточно точно, но есть очень простой способ исправить положение. Ослабив болты в правильных отверстиях, нужно вставить метчик в неточное и вкрутить его в отверстие в раме с уже нарезанной резьбой. Метчик врезается в пластик и немного его стачивает с нужной стороны, но нам немного и надо, чтобы закрутить болт. Простой трюк, но работает.
День 8: Все готово!
Все можно было собирать, когда доставили исправленные батареи для робота. Я прижал их к раме несколькими хомутами и подсунул под них небольшие пластиковые крепежные пластины для радиопередатчика и его батарей, которые разместились сверху основных батарей. Пластины были предназначены не только для крепления, но и для амортизации. Радиопередатчик крепится к ним на липучках и стяжках от проводов. Еще один пластиковый кожух закрывает все сверху, большой разъем позволяет быстро присоединить питание. С другой стороны кожуха находится сигнальный светодиод питания и небольшое отверстие для подключения батареи передатчика. Радиоантенна прикреплена сверху, как вы, наверное, уже догадались, на липучках.
Все ходовые испытания успешны. Осталось добавить немного клея на крепежные болты, и вперед, в бой!
Весь проект занял: 20 часов.
Robot Assault 2004: Мелкие неприятности
Всегда стоит опробовать робота перед основным испытанием. Для проверки боем были выбраны соревнования Robot Assault, состоявшиеся в День труда (1 сентября). Эти соревнования давали мне возможность обнаружить недоработки конструкции и за месяц, остававшийся до национальных соревнований, исправить их. К сожалению, мои дети не смогли на них пойти из-за неприятностей в школе, и мне пришлось биться самому.
Как видно на фотографиях, роботу немало досталось на пути к третьему месту (повреждения, видные на рисунках нанесены роботом Intrusive Interloper, - это детище команды Team Radicus). Оба поражения произошли по разным причинам: первое – классическая "черепаха", когда действительно серьезный противник Xhilarating ImpaX (в его конструкции были специально предприняты очевидные меры против роботов, подобного Totally Offensive в виде стальных клиньев и крыльев) подбросил мой робот в воздух. Приземлившись вверх колесами, мой робот уже не может перевернуться, несмотря на все мои ухищрения с оружием. Да, у команды Rolling Thunder был свой план, и они его блестяще реализовали. Потом, в бое за второе место мне удалось нанести несколько серьезных повреждений ветерану "Eat Hitch and Die", я полностью разбил ему бок, но отдача ударов была настолько сильной, что разошлись несколько сварных швов, крепивших батареи и мой робот выбыл полностью. Его противник был все-таки еще жив и победил. В других боях, в которых Totally Offensive вышел победителем, у него погнулась передняя балка рамы, разошлось несколько швов, и еще раз отказали батареи (к счастью, последним ударом мой робот все-таки нокаутировал противника и вышел победителем). Работы по усовершенствованию робота предстояло много. С хорошей стороны показала себя электроника и моторы: ни одного отказа, улучшенная система крепления моторов полностью защитила их от повреждений.
Одно из достоинств подобных соревнований – это возможность лично поговорить со своими коллегами и обменяться идеями. С Полом Вентимиглиа (Paul Ventimiglia) мы потратили много времени на обсуждение наших роботов. Его детище, Green Wave (робот подобного типа, с вращающимся оружием) наносил такие сильные удары, что повредил свои собственные подшипники, а мне было интересно, что можно сделать с изогнувшейся балкой моего робота.
После удара Totally Offensive по противнику отдача удара перешла на редуктор (около лезвия) и он сдвинулся, из-за чего основная балка (к которой прикручен редуктор) скрутилась. Балка хорошо сопротивляется изгибу, но легко скручивается. Очевидно, что надо как-то ее укрепить, но запаса по весу у меня не было: робот и так находился на пределе 30-ти фунтов (13,6 кг).
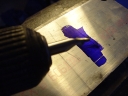
Небольшой запас по весу появлялся, если заменить никель-кадмиевые батареи никель-металлгидридными, так выигрывалась пара фунтов (почти килограмм). К счастью, у Пола родилась потрясающая идея: нужно протянуть полосы от редуктора к задней балке и очень сильно натянуть их. Тогда, чтобы отдача смогла сдвинуть редуктор, ей придется погнуть и заднюю балку, потому что натяжение будет передаваться по этим полосам. В теории это выглядит замечательно.
По дороге домой у меня было много времени, чтобы подумать над этим планом (достаточно долгая дорога) и, приехав домой, отправил Терри из Team Whyachi e-mail чтобы узнать, что можно сделать. Спустя пару дней и 40$, у меня оказалась пара титановых лент с натяжным винтом. Немного подгоночной работы и я затянул ленты на месте, ослабив усилие на винты и (надеюсь!) решив еще одну проблему.
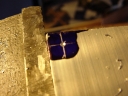
Немного сварки и треснутые швы исправлены, можно решать проблему батарей питания. Я попросил помощи на форуме BattleBots. Наиболее подходящее и благородное решение предложил Дик Ступлич (Dick Stuplich), водитель New Cruelty, Goosfraba и многих других потрясающих машин. Это было действительно радикальное решение: 4 батареи располагаются последовательно одна за другой, а потом 5 таких отрезков соединяется в виде буквы Х и скрепляется стекловолокном в монолитный кусок, точно входящий между ребрами швеллера. Чтобы сломать такую конструкцию, нужно весь робот превратить в груду металлолома. Ее единственный недостаток – малое охлаждение из-за теплоизолирующего слоя стекловолокна. Но посмотреть, как оно работает все-таки стоит, в крайнем случае, добавим жидкого азота и сделаем мороженое с техническими отходами. Дик, твой гений меня спас!
В конце концов, с запасом в 1,3 фунта (0,6 кг) я сделал новые части кожуха и добавил сверху большой обод, чтобы робот мог перевернуться, оказавшись вверх тормашками. Благодаря тому, что центр тяжести робота находится очень низко и сильно смещен вперед, в перевернутом виде он неустойчив и сразу возвращается в нормальное положение. Я не совсем точно выразился: существует вероятность, что робот окажется на боку, но в таком положении он касается земли каким-нибудь колесом и, резко раскрутив его, можно вернуть робот в нужное положение.
Ремонт и усовершенствования обошлись в 280$, но Totally Offensive готов к национальным соревнованиям. Пожелайте нам удачи, моим детям она понадобится: в классе роботов до 30-ти фунтов весом (13,5 кг) есть несколько очень серьезных противников.
Весь проект занял: 30 часов
Национальные соревнования 2004 года: Totally Offensive – чемпион!