
Совсем не трудно найти подходящую по размерам и характеристикам радиоуправляемую машину и позаимствовать детали от ее подвески. Конечно, в машинах обычно 4 колеса, а в роботе-внедорожнике рекомендуется использовать 6 колес. Поэтому недостающие компоненты придется снимать с еще одной машины или заказывать/покупать отдельно.
Подвеска для jBot была взята от модели радиоуправляемого джипа Traxxas
E-MAXX. Вообще, для экспериментов в конструировании роботов на основе запчастей от радиоуправляемых машин рекомендуется останавливать свой выбор на наиболее популярных, но немного устаревших моделях. Тогда будет легко достать заводские детали или приобрести несколько подержанных моделей и разобрать их на запчасти.
Хотя в оригинальной модели E-MAXX передние и задние колеса могут быть присоединены к рулевому управлению, в jBot это не было реализовано. Колеса были жестко прикреплены к колесной балке.
 Нужные нам детали - это все, начиная от торца балки и до колеса, включая карданный вал (но не сам передаточный механизм). Чертежи можно найти на сайте Traxxas, например, здесь приведена часть
схемы (pdf) задней подвески.
Нужные нам детали - это все, начиная от торца балки и до колеса, включая карданный вал (но не сам передаточный механизм). Чертежи можно найти на сайте Traxxas, например, здесь приведена часть
схемы (pdf) задней подвески.
Пружины, амортизаторы и колеса были взяты непосредственно от модели E-MAXX, а шины использовались марки "Road Rage".
На нижеприведенных рисунках изображен, быть может, наиболее простой и элегантный способ соединения деталей Traxxas с роботом.
Первый шаг заключается в закреплении осей и опорных элементов для обеспечения взаимодействия шасси робота с карданными валами и подвеской.
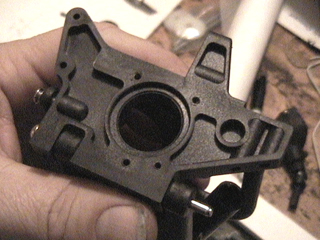

Торцы балок имеют круглые приемники, которые обычно соединяют подвеску и дифференциал.
Однако здесь в каждый приемник был помещен специально изготовленный опорный элемент из нейлона, который был привинчен к торцу балки.
Нейлоновые детали обладают тем интересным свойством, что они "автоблокируют" все винтовые крепления.
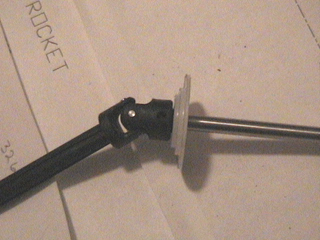

Затем были изготовлены оси из четвертьдюймового (6,4 мм) сверлильного прута; у них просверлили концы, чтобы соединить с карданными шарнирами.
На внешних концах осей располагаются зубчатые ременные шкивы, которые передают усилие на колеса jBot.


Внутренние концы осей закреплены в 12 мм шарикоподшипниках, а те, в свою очередь, вставлены в алюминиевые несущие стойки. Алюминиевые шкивы привинчены к дискам, закрепленным на осях. Они приводятся в движение 5 мм зубчатыми ремнями.
В результате все колеса на каждой из сторон синхронно приводятся в движение ременным приводом от одного мотора. На рисунке изображено собранное шасси (на пенопластовой подставке) с уже установленными аккумуляторными стойками (желтого цвета).

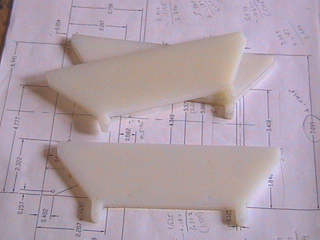
Из нейлона также были изготовлены три амортизирующие распорки, к которым прикрепили балки подвески.
Все нейлоновые детали были покрашены в коричневый цвет, как можно видеть на нижеприведенных рисунках.
Верхнюю и нижнюю платформы шасси изготовили из стеклопластика толщиной в 1/8 дюйма (3,2 мм).


Стойки для мотора были сделаны из алюминиевой пластины толщиной в 1/4 дюйма (6,4 мм); дырки высверлены при помощи рольганга.
На правом рисунке изображены соединенные вместе стеклопластиковая платформа шасси, алюминиевые стойки мотора и нейлоновые амортизирующие распорки.
Нейлоновые шарикоподшипниковые холостые шкивы нарезали из прутковой заготовки, а втулки на 7/16 дюйма (12,2 мм) и крепежные пластины сделали из алюминиевой платы толщиной в 1/4 дюйма (6,4 мм).

Они предназначены для того, чтобы поддерживать натяжение ременного привода, соединяющего три колеса на каждой из сторон.
Эти холостые шкивы нужно делать максимально большего диаметра, так как чем сильнее провисание ремня, тем больше потеря мощности. В модели jBot их диаметр составляет примерно 1,5 дюйма (3,8 см).


На рисунках изображено полусобранное шасси (нейлоновые амортизирующие распорки пока еще белого цвета).
Еще надо установить приводной механизм (шкивы, ремни) и аккумуляторы.

Следующая фотография - шасси jBot уже в полной сборке. Осталось только установить электронику и датчик.

На левом рисунке видно, как на платформе шасси расположена электроника. Здесь два контроллера скорости
Devantech H-Bridge и микроконтроллер
MRM
68332. Проводка (не показанная на рисунке) находится внутри шасси.
Кроме того, в роботе jBot используются квадратичные круговые датчики положения на моторе, четыре сенсора Polaroid, 3-осное инерционное устройство измерения Microstrain, GPS приемник Garmin Etrex.
Операционная система и алгоритмы навигации были написаны на основе алгоритмов для моделей роботов SR04 и nBot. Поддерживается многозадачность, чтобы можно было выбирать из набора типов поведений. Мощный модуль Турбо-Пасаля в процессоре Motorola 68332 обеспечивает интерфейс на основе прерываний от внешних устройств. Обрабатываются прерывания от пользовательского ввода/вывода, драйверов мотора, квадратичных кодировщиков, пропорционально-интегрально-дифференциальных (ПИД) контроллеров скорости и от модуля радиоуправления (в случае непредвиденных ситуаций). Также возможно подключение видеокамеры.










