"Инженерная газета", ноябрь 2004: От учебных машин к планетным роверам |
Спектр задач, связанных с созданием интеллектуальных роботов, весьма обширен. Это — задачи автоматизации существующих мобильных (колесных, гусеничных) машин и разработки подвижных машин, которые могут служить, например, целям разведки и освоения новых территорий. А также задачи создания интеллектуального автомобиля и, в перспективе, автоводителя. И, наконец, создания сложных аппаратов для освоения планет Солнечной системы — последователей славных отечественных «Луноходов». Для наименования последних появился даже специальный термин — планетные роверы.
К названным выше весьма близко примыкают задачи изучения и создания машин на принципиально новых движителях — адаптивных гусеничных, шагающих и колесно-шагающих с активной адаптацией, машин, движущихся подобно змеям, а также способных лазить, в том числе — по вертикальным стенам и даже по потолкам.
Для каждого из перечисленных типов подвижных машин уже существуют области их будущего применения. И нужда в подобных машинах ощущается все острее.
Машины с адаптивным шасси — и гусеничные, и, особенно, шагающие и колесно-шагающие — могут передвигаться по бездорожью, по сложному рельефу. И поэтому могут использоваться в горных районах, болотистых зонах, в тундре, в районах техногенных и природных коллизий. Известно широко разворачивающееся применение таких машин для исследования вулканов и районов с повышенной сейсмической активностью.
Крайне важно, что машины, использующие принцип шагания, оставляют на местности не непрерывный, а дискретный след. И даже могут выбирать места для «наступания». Поэтому они, например, наносят значительно меньшие повреждения почве, посевам. И вообще являются экологически более «чистыми».
Колесно-шагающие машины эффективно сочетают преимущества колесных машин (прежде всего, высокую скорость на простых поверхностях, на дорогах) и достоинства машин шагающих (приспособляемость к рельефу в режиме шагания). Машины с движителями типа змеи способны эффективно перемещаться по сыпучим грунтам, двигаться в узких проходах, напоминающих лабиринты.
Сфера применения лазающих машин также весьма обширна. Это — мойка окон в высотных зданиях, инспекционные и ремонтные работы на поверхности резервуаров нефте- и газохранилищ, контроль состояния поверхностей рабочих блоков атомных реакторов, контроль, необходимый ремонт и, скажем, очистка и окраска вертикальных поверхностей бортов больших кораблей, многие другие подобные операции.
Принципиальным является тот факт, что движение таких машин и управление ими являются весьма сложными процессами. Поэтому и решение соответствующих задач возможно только путем их создания как роботов, с использованием накопленного робототехникой опыта. Технически создание адекватных систем управления стало возможным только в последнее время — на основе того прогресса в микроэлектронике и микромеханике, который мы сейчас наблюдаем.
Понятно, что создание таких машин немыслимо без подготовки молодых специалистов. Поэтому к решению этой задачи необходимо привлекать уже студентов. Сегодняшние студенты и аспиранты станут теми учеными и инженерами, которые будут воплощать идеи создания и применения таких машин в самое близкое время. Возможности для этого уже существуют.
Одной из форм привлечения студентов и аспирантов к решению задач создания интеллектуальных подвижных роботов стало участие в ежегодно проводимых в МГУ Фестивалях «Мобильные роботы». Такие роботы имеют прототипы всех устройств, необходимых их будущим «старшим собратьям». И по этому являются перспективными и удобными «моделями» для отработки новых систем и методов, будущих технических решений. Создаются такие роботы молодежными командами энтузиастов, которые учатся и решению современных сложных задач и решают их в процессе своей совместной работы.
Все началось с того, что осенью 1994 года Московский государственный университет получил приглашение послать студенческую команду для участия в Мировом ежегодном соревновании мобильных роботов. Эти соревнования ежегодно проводились во Франции под патронажем французского Министерства науки и техники. Вызов был принят. И группа молодых ученых и студентов начала проектировать и строить соответствующий робот. К работам в области создания колесных мобильных роботов активно подключился Институт механики МГУ.
В соответствии с правилами этих соревнований, робот должен был выполнить достаточно сложную задачу. Полигон, на котором соревнуются машины, похож на шахматную доску — он состоит из черно-белых квадратов размером 2х2 м. Цветоконтрастная полоса достаточно сложной формы пересекает квадраты. Она черная на белых квадратах и белая — на черных.
Несколько (до 10) шаров французского бильярда различных цветов помещены на полосу. Робот должен следовать по полосе, собирать шары и сортировать их по цвету. Шары «правильного» — заранее заданного цвета — нужно доставить к финишу. Время полного действия (решения задачи) должно быть минимизировано. Также должны быть выполнены несколько дополнительных заданий.
Организаторы снабжали участников соревнований в категории «Монотип» стандартными шасси, колесами и главными двигателями — чтобы уравнять стартовые условия. А дальше участники были свободны в проектировании и реализации остальных частей машины, всех ее систем, автоматики и электроники.
Команда МГУ со своим роботом «Монотип» принимала участие в соревнованиях три раза — в 1995-м, 1996-м, и 1998-м гг. Первый раз команда вышла в финал, два последующих раза она выиграла первый приз, решив полностью задачу и показав наименьшее время. Готовясь к каждому соревнованию, команда улучшала машину — повышала ее рабочие скорости и надежность.
Соревнования эти имели и другую категорию — «Свободный». Машины этого класса были ограничены только в размере. И решаемая ими задача была более сложной.
Постепенно к участию в соревнованиях мобильных роботов подключались и другие российские коллективы. Так, студенческая команда Московского энергетического института (ТУ) выиграла Гран-при для роботов класса «Монотип» во французском Соревновании'99. И это при том, что правила этих соревнования неуклонно усложнялись.
С 1998 г. были организованы и начали проводиться российские Фестивали мобильных роботов с международным участием. Они ежегодно проходят в МГУ. И предназначены для команд молодых ученых и студентов.
Организаторами Фестивалей выступают МГУ, Институт механики МГУ, Институт прикладной математики им. М.В.Келдыша РАН и МЭИ(ТУ). Обычно в Фестивалях участвуют команды нескольких стран. Программа поддерживалась в рамках государственного проекта «Интеграция». Каждый из Фестивалей включает научную конференцию, демонстрацию различных мобильных роботов и соревнования роботов как центральное событие. Очередной, восьмой российский Фестиваль будет проведен в марте 2005 г.
Правила российских Фестивалей отличаются от французских. И основаны на взаимодействии роботов со специальными инфракрасными (ИК) маяками, размещенными над плоскостью передвижения роботов на высоте примерно в 1 м. Включением и выключением маяков управляет компьютер, который контролирует весь процесс соревнований.
При выполнении поставленной задачи роботом должно быть выполнено выключение очередного маяка, что он осуществляет путем «касания» маяка (слегка ударяет по нему). В последних соревнованиях использовалось также бесконтактное переключение маяков. Самое простое испытание состоит в том, что компьютер полигона включает один из маяков, а робот-участник должен найти маяк, подойти и коснуться его. В ответ компьютер полигона включает другой маяк и так далее.
Возможно, что компьютер полигона включит сразу два соседних маяка. В этом случае робот должен «опознать» их как ворота и пройти между ними. Если не один из маяков не включен, то робот должен найти на полу специальную ведущую (направляющую) линию. И следовать по ней до того момента, когда какой-либо маяк или два маяка не будут включены. После этого робот должен немедленно проигнорировать направляющую линию. И перейти к взаимодействию с маяками так, как это было описано выше.
Для новых Фестивалей будут использоваться более сложные конфигурации маяков и другие усложненные задачи. С тем, чтобы стимулировать развитие логических способностей роботов.
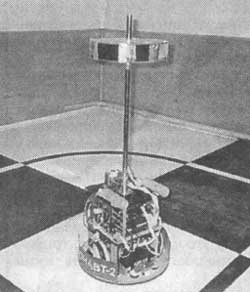
Необходимо отметить, что участниками использовались различные системы управления и различные типы оптических ИК-датчиков. Например, командой ИПМ им. М.В.Келдыша РАН и МГУ построен робот, снабженный сенсором «фасеточного» типа, помещенным на вершину специальной мачты робота. Есть и другие решения.
Объединенной командой Института прикладной математики им. М.В.Келдыша РАН и кафедры теоретической механики и мехатроники механико-математического факультета МГУ разработаны и изготовлены роботы «Аргонавт-1» и «Аргонавт-2». Первый построен по трехколесной кинематической схеме, второй — по четырехколесной. Оба — с так называемым «дифференциальным приводом». Робот «Аргонавт-1» имеет предельную скорость движения порядка 1 м/сек, робот «Аргонавт-2» — порядка 2 м/сек.
В состав системы управления роботов входят центральный компьютер и компьютер управления движением (машина нижнего уровня). У «Аргонавта-1» есть и видеопроцессор (отдельный компьютер для обработки телевизионных данных) для работы с системой технического зрения. У робота «Аргонавт-2» функции технического зрения реализует центральный компьютер, поскольку его вычислительная мощность достаточна для решения таких задач.
На аналогичных принципах реализованы и оптические ИК-локаторы роботов «Аргонавт-1» и «Аргонавт-2». Они позволяют осуществлять непрерывный мониторинг состояний маяков вокруг робота. В управлении локаторами реализован специальный принцип контроля «появления-исчезновения» маяков в каждом секторе обзора. Отсюда — достаточно высокие точности определения направлений на маяки — порядка Г и выше.
В настоящее время (осень 2004 г.) ведутся эксперименты по оснащению роботов системой технического слуха. Текущая версия включает 2 микрофона — слуховых сенсора со специальным усилителем. Выход системы подключается к АЦП центрального компьютера.
Роботы имеют бортовые автономные системы электропитания. Раздельно — от разных аккумуляторов — осуществляется питание электронных устройств систем управления и силовое питание тяговых электродвигателей. Зарядка аккумуляторов может проводиться как на борту роботов, так и на внешних зарядных устройствах. Тем самым обеспечивается высокий коэффициент рабочей готовности роботов.
Роботы «Аргонавт-1» и «Аргонавт-2» успешно выступали в Фестивалях «Мобильные роботы» в МГУ. В целом с 1998 года они завоевали более 15 призовых мест, 8 из которых — первые. Постоянно ведется совершенствование конструкций роботов и их программного обеспечения.
А что же в будущем?
Заманчивая перспектива — создание сложных автоматических машин для исследования планет. Речь идет о планетных роверах, которые нужно рассматривать как весьма специфический класс роботов. Они предназначены для доставки на поверхности планет, должны передвигаться по планетам, выполнять научные исследования, передавать их результаты на Землю. Эти роверы представляют собой автоматы для работы в экстремальной окружающей среде поверхностей планет.
После «Лунохода» в ряде организаций нашей страны была выполнена большая теоретическая и экспериментальная работа для того, чтобы разработать и построить машины для исследования поверхности Марса. Широкий поиск принципов движения закончился созданием оригинальных и эффективных машин, обеспечивающих чрезвычайно высокую способность передвижения по пересеченной местности, на скалистом ландшафте и на рыхлом грунте. На повестке дня — создание не только марсоходов, но и роверов для исследования Меркурия, а также комет.
Есть большие международные проекты, в которых в качестве основных шасси для планетных роверов рассматриваются шагающие многоногие движители, обеспечивающие и шагание, и лазание одновременно. Функционирующие сегодня на Марсе подвижные роботы имеют адаптивные колесные шасси. Все это только подчеркивает важность задач исследования сложных мобильных аппаратов — их механики и принципов управления ими.
Системы управления таких роверов должны включать все те подсистемы, которые описаны на примере соревнующихся на Фестивале роботов. Роверы должны автоматически строить свои движения, уметь видеть и слышать окружающую среду, а в будущем — осязать ее и чувствовать запахи. Должны уметь оперировать сложным инструментом и связываться с посадочным или орбитальным аппаратами и Землей.
Важно еще раз подчеркнуть: методы управления всеми такими системами и обработки данных от них сегодня уже фактически созданы. Тем самым заложена техническая база создания реальных конструкций.
Отсюда видно, как интересны, важны, но и насколько сложны задачи, связанные с созданием автоматических передвигающихся машин. Во всем мире этим задачам уделяется повышенное внимание — от значительных инвестиций в проекты до поддержки молодых ученых, организации соревнований роботов. Результатом всего этого является ускоренное решение задач создания автономных подвижных роботов с искусственным интеллектом.
У нас в России подобные работы тоже идут. И идут активно. Но они сдерживаются недостаточным финансированием. И этот характерный для теперешней России вопрос необходимо решать как можно скорее. В нашей стране есть специалисты, которые смогут создать подобную передовую технику весьма быстро, есть богаты традиции решения научных и технических задач на уровне выше мирового. И мы надеемся, что российская робототехника не станет исключением. Все предпосылки для этого есть.
Дмитрий Охоцимский, академик; Владимир Павловский, профессор;
Институт прикладной математики им. М.В.Келдыша РАН, механико-математический факультет МГУ им. М.В.Ломоносова
|










